fala galera beleza aqui é o wagner ramos do wr que este ano e este é mais um vídeo de engenharia eletrônica nossa clássica além de aulas de sexta na ordem hoje temos o conteúdo que muita gente pede muita gente solicita eletrônica de potência e vamos falar de ponte h eu tenho uma topologia de ponte h que utiliza apenas transistores darnton np en uma topologia muito interessante componente simples pra você implementarem projectos seja para controle de motores seja para circuitos inversores enfim o que você necessitar quando chegar um circuito realmente última etapa de potência bastante conhecida
mas essa tecnologia talvez seja uma novidade para você então já deixou aqui no vídeo inscreva-se no canal se novo por aqui não deixe de se inscrever e também clique no sininho ativos fininho assim você é notificado sempre tem vídeo novo sempre tem novidade que o wr channel este vídeo é um oferecimento da toróide do brasil acesse toróide ponto com ponto br o primeiro link aqui na descrição se você precisa de um transformador toroidal o indutor o ideal para o seu projecto algo sob medida toróide o ponto com ponto br primeiro link entre em contato e
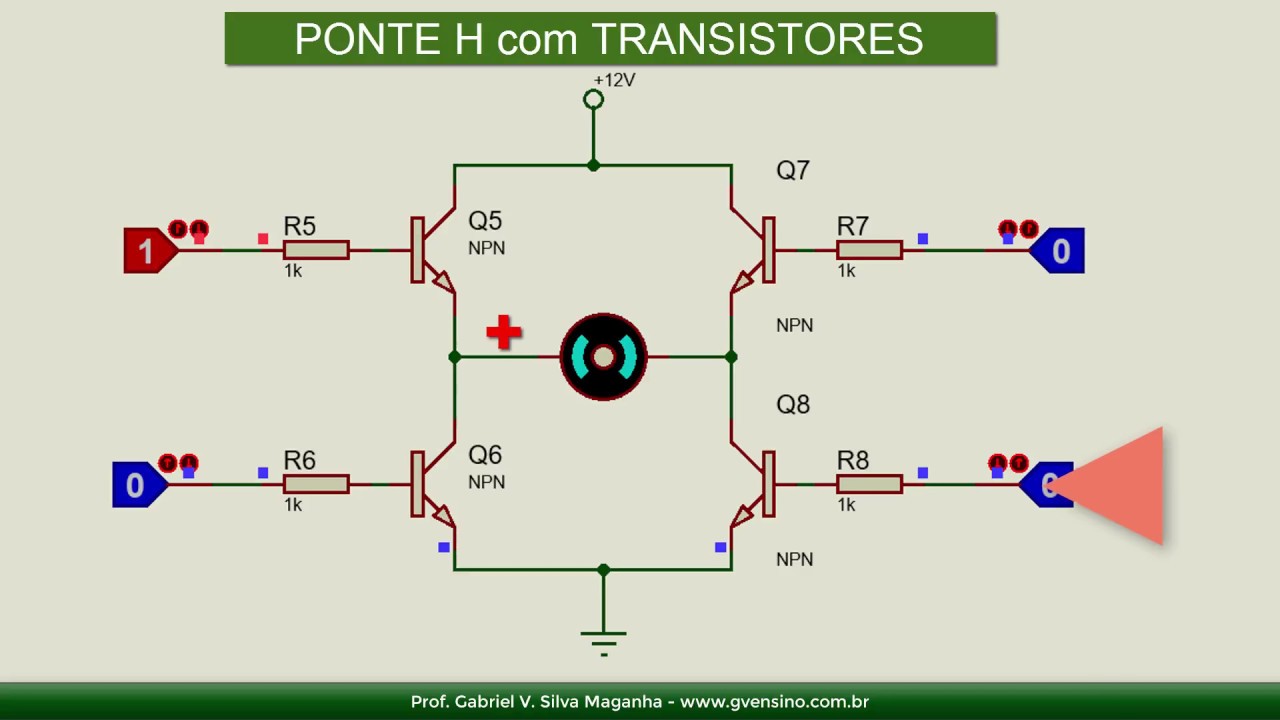
faça já a sua cotação bom pra onde hoje estão prontos uma análise teórica e depois é claro que na bancada análises práticas como de costume let's get saredi na clássica de sexta de hoje temos eletrônica de potência muita gente que assiste o canal gosta do conteúdo eletrônica de potência realmente é bem bacana sempre uma honra e gravar uma clássica de sexta pois reunimos conhecimento dos demais cursos aqui do canal nossa clássica de sexta é sempre trazendo uma aplicação um projeto bacana pra você e já está aqui o circuito completo da ponte h utilizando transistores darlington
apenas npn então essa é a sacada desta ponte e funciona maravilhosamente bem como vamos ver daqui a pouquinho já na bancada observe que estou utilizando aqui o tip 122 você pode utilizar o tipo 120 ou outro darlington npn de sua preferência você precisa de quatro transistores para uma ponte h e aí você controla o motor com esta tecnologia por exemplo um circuito envolvendo o projeto de um robô por exemplo basta duplicar aqui a ponte h e aí você tem controle de dois motores em ambos os sentidos ou parar ou gerar o pwm pra eles é
muito bacana bem simples de entender o funcionamento eu vou explicar aqui o lado esquerdo da ponte você já vai entender certinho eu tenho aqui alimentação que deve ser uma atenção aí 10 a 4 a 2 volts acima da tensão no motor então se o motor e 12 volts alimente com 14 aqui a ponte h certo eu tenho aqui a entrada um entrada dois aqui na lei bon jovi que eu coloquei entrada 1 de novo mas a entrada 2 vou editar o arquivo para download no que está na descrição já vai estar corrigido certo galera então
aqui entrada 2 e aqui entra um na entrada 11 quando aplica um sinal aqui um nível lógico alto por exemplo 5 volts ou saturno o trânsito então o trânsito porque dois aqui estará na região de saturação conduzindo corrente do coletor pelo emissor certo nós temos aqui um diodo esse de ouro é o segredinho para conseguirmos utilizar o trânsito só trânsito e cnn neste nessa situação que dois estando saturado com do corrente e eu tenho aqui um potencial 0 no terminal da esquerda do meu motor neste mesmo instante como surge 0 na esquerda do motor também
surge aqui no coletor de que 20 e eu aplico 0 a base de que um que um está cortado nesta situação certo e é muito simples de compreender o motor gira em um sentido no caso aqui do lado oposto estar conduzindo corrente aqui a partir de que três então o sentido convencional conduzimos corrente coletora emissora de que 3 passa pelo motor segue esse caminho e vai para o gene de aplicando nível lógico alto em 11 na entrada um e na entrada dois aqui aplicando nível lógico baixo se aplica o nível lógico bairro lindas as entradas
eu tenho corte de que dois aqui no lado esquerdo e que quatro no lado direito motor estará parado eu aplico nível lógico alto em ambas as entradas eu tenho a saturação de que 2 a saturação de quatro motores estará parado para movimentar o motor portanto preciso e níveis lógicos distintos aplicando 10 em um o que acontece aqui é cortar q2 saturar quem conduz o concorrente do coletor pelo emissor nós temos um potencial positivo aqui esquerda do motor colocando 10 na entrada dois eu conduzo corrente do coletor pela emissora em que quatro isso hoje um potencial
em 0 aqui à direita do motor então nós temos a corrente circulando por este caminho aqui no sentido convencional então é mesmo o oposto de aplicar um na entrada uma entrada à esquerda de zero na entrada da direita compreendeu desta forma possível o controle do motor em ambos os sentidos de rotação 12 níveis lógicos simples e também a parada dele aplicando ou 00 era ou um lógico eu paro o motor e eu posso ainda fixar nos lados por exemplo em uma o nível lógico alto e aplica um sinal pwm na entrada 2 para controlar a
velocidade do motor se eu quero uma velocidade reduzida uma inversão de sentido eu coloco uma entrada 2 e aplico pwm na entrada um então é muito versátil uma ponte h com componentes simples e uma ponte há gato você pode controlar motores até um amp pé mas no entanto se você substituir aqui de 1 e d2 por diodos que suporta em maior corrente por exemplo um n 54 02 que são de outros para 3 amperes você pode na teoria controlar motores até três andares mas é claro que é sempre um pouco abaixo disso só que aí
você consegue acionar os motores um pouco acima e um pé utilizando se de outros maiores porque os transistores tipo 122 você olhar um datasheet verão que a corrente de coletor é pra 15 amperes se não me falha a memória eu deixo como exercício pra você verificar se há cinco peles mesmo e é isso galera o hardware é bem simples na verdade só que eu fiz um elemento adicional que eu deixo como brinde pra você aí que é um código aqui pra arduino para testar pontes h olha que maravilha então chicoteou aqui eu tenho aqui duas
saídas saída um saída dois que vão respectivamente na entrada um de entrada 2 a minha ponte h eu escolhi os digitais 5 e 6 que tem pwm pois eu estou utilizando a plataforma arduino promicro certo e os digitais 56 da prova micro tem pw então utilizando estas duas saídas aí e mais um botão no digital 16 do promic lo facilmente você converte esse código dado no uno abandonando por exemplo certo funções aqui eu tenho uma pra ler o botão uma equipe para o motor essa atingir o motor no sentido horário essa gira no sentido anti-horário
essa gira no sentido horário como pwm ou seja uma velocidade reduzida e essa gira no sentido anti-horário com pwm uma velocidade reduzida variáveis globais uma boliviana para fleck do botão e uma para selecionar qual função estará sendo chamada também de acordo com o botão que eu pressionar eu vou estar chamando uma destas funções aqui nestas cinco funções que eu criei para acionamento do motor é claro que você pode pegar este código aqui estar junto para download aqui na descrição e acrescentar outras funções de controle e sua preferência configurei então como saída as duas saídas que
funcionará ponte h o botão uma entrada com o público interno por isso input boa quando o profissional e univates com baixo para a respectiva entrada inicializar as duas saídas aqui com louco lógico baixo loop infinito eu chamo a função para ler o meu botão e aí de acordo com o conteúdo de funk num número da função eu chamo uma das funções de controle do meu motor de acordo com o case específico então aqui na leitura do botão eu clico botão e acionou flag dele atribuindo a ela que o texto se o botão foi solto por
isso digital luís dê bt quando eu solto o botão é nível lógico alto o que tem público interno e dois comerciais flag citada na neve contendo um processo que eu quero fazer com esta é a função da técnica clico quando eu soltar ela processa então eu limpo a flag para uma nova seqüência lógica depois incremento em uma unidade o número de função se for maior que 5 volta para 12 no momento atual tem apenas estes cinco casos aqui então temos uma lógica circular 1 2 3 4 cinco voltas para 1 no próximo clique aqui um
delay apenas pra balsini seja repetido no botão função para parar o motor estou enviando nível lógico baixo nas duas saídas poderia ser biológico alto e também vai parar sentido horário então sair da une ray saída 2 em louca anti horário inverso da um novo site a 2 em ray pwm a sair da une ray então veio a sair da uva na entrada na ponte h ela recebe neurológico alto e eu uso o análogo right na saída 2 para enviar para entrar na 2 da ponte h o meu deste site dante saiba o que configurou aqui
ó um parâmetro da função e pwm no sentido anti horário é o mesmo só que aí o análogo no haiti né saí dão um sinal que vai pra entrada 1 da ponte alagada e aqui na chamada eu estou determinando da ti são um valor entre 0 255 eu coloquei aqui pros dois casos o valor 55 você pode trabalhar no código aí criar uma variável global fazer alteração deste site com o segundo botão por exemplo então fica a seu critério não é um código aí que temos aí cinco funções para ver o comportamento do motor na
prática tão honrado é esse tem mais este software adicional ainda a placa promicro então tá aqui ó saída da a5 vai na entrada uma ponte h sair da cesan entrada 2 e o botão está ligado diretamente no pino 16 do aluno promicro um lado vai propor no 16o outro lado vai pro gnr eu tenho um empurra interno ali é isso aí galera vamos pra bancar a fazer os testes desta ponte agatha bem interessante venha comigo antes de irmos pra bancar aquela clássica dcc tenho um recadinho rápido galera lembrando que está rolando aquela promoção bem bacana
a galera que adquirir o curso mt spice básico wrt martin vai estar concorrendo ao sorteio de um osciloscópio logan chutes rtc 1002 novinho o link do curso está aqui na descrição baixíssimo custo um amplo conteúdo já demonstramos o conteúdo do curso aqui no canal com conteúdo sensacional mesmo quem já tem um certo conhecimento e lt spice vai aproveitar o conteúdo e de quebra você ainda está participando desta super promoção aproveite pra ter a chance de ganhar um osciloscópio nível avançado que tem além de osciloscópios tft tem gerador de funções gerador de padrões testador de componentes
muitos recursos possibilidade de upgrade também não se os corpos sensacional que você tem a chance de ganhar então é só comprar o curso tem spice básico já estará concorrendo então corri até o dia 17 de agosto de 2019 [Música] no detalhe a montagem prática da nossa ponte a um circuito bem simples eu tenho aqui o arduino promicro é opcional só utilizei com aquele código pro teste específico da ponte h e você vê aqui os transistores chip 122 npn darlington aqui está conectado motor por enquanto eu vou desconectar penas para os primeiros testes depois vamos ver
a movimentação está utilizando um motor desse de 12 volts eu esqueci de falar na parte teórica galera esses e outros aqui são para a proteção certo os motores uma carga indutiva então temos assis de ouro sestak o n 4007 demais componentes estão aí você observar a enxergar ele sair na nossa montagem aqui está o botão 1 click simples eu vou mudando entre aquelas funções que configuramos vamos então alimentar com cinco votos aqui a 5 volts da fonte de bancada que vai para o circuito lógico de acionamento aqui 14 volts que a atenção da ponte h
que vai suprir o motor e os dois genes desses estão aqui ligados em conjunto com a nossa fonte de bancada devidamente configurado 14 volts e 5 volts e nós temos aqui dois amperes e 500.000 impérios de limitação decorrente já vou liberar a saída nesse instante nós temos o consumo observado aí é claro que não está consumindo nada pois não têm carga na ponte h e aqui no 5 volts esse consumo aqui é basicamente do arduino promicro e os seus médios um bóton estes são sinais que vemos nas saídas do arduino promicro então a primeira função
é o motor parado nós temos nível lógico baixo na saída 1 a 1 em velórios por baixo na saída da a2 um clique no botão eu estou na função que movimenta o motor no sentido horário e jack à saída 1 foi pra nível lógico alto a saída dois permanecem no zoológico baixo próximo a função inverter o sentido então devemos ver a inversão dos dois sinais aí saída um foi para a nível logístico baixo saída 2 para nível logístico alto essa função faz o motor girar no sentido anti-horário próximo a função já era um pwn está
aqui vamos ajustar o twitter para o canal 2 treinada para o canal 2 nós vemos o nosso pwm o valor 55 bem como esperado ele o canal um nível alto a próxima função vai gerar o pedro e no canal 1 o canal 2 vai estar nível lógico alto então mais um clique no botão taí outra ligar o canal um feito mesmo sinal de pwn pois colocamos o mesmo de antes aiko lá no nosso código mais um clique no botão eu volto para a primeira função que é o motor parar tudo funcionando conforme previsto aqui em
nosso código outro teste bacana de funcionamento da nossa ponte h utilizando um voltímetro um lugar do motor assim conseguimos ver se o sentido de rotação está correto agora estamos com a função que para o motor eu tenho 10 volts totalmente coerente próxima função motora se movimenta no sentido horário eu tenho - 13.43 voltar aqui mas na realidade só inverter as ponteiras para ter um valor positivo isso é o de menos mas estamos fornecendo tensão na saída da ponte h podemos verificar isso no próximo clique o invento sentido portanto esse valor deve virar positivo só fixar
melhor aqui a ponteira e vamos aplicar de novo aí ó perfeitamente então invertido o sentido ó está comprovado que na tela do altímetro agora no pwm nós temos o valor aí um pouco mais abaixo também é coerente estamos aplicando um sinal pwm e uma das saídas aí próximo eu tenho o mesmo valor positivo 10 virou alguma coisa e no próximo para o motor novamente então pelo voltímetro já conseguimos ver que está funcionando legal nosso sistema ainda galera antes de conectar o motor propriamente dito eu posso vir com o osciloscópio aqui ligar um canal em uma
das saídas da ponte hagai outro canal na outra saída e aí no próprio instrumento utilizar a função de matemática para fazer a subtração destes dois pontos do circuito e observar assim a forma de onda será sobre o motor deve ser um sinal próximo aí de 14 aliás de 12 volts que a tensão do motor 14 voltas atenção que estamos alimentando aqui a ponte h e agora na tela do tec thrones nós temos aqui um dos sinais então saída da ponte h no canal o o outro sinal e aqui na linha matemática diferença entre os dois
na função nós temos um valor zero seria a atenção sobre o motor aqui nós temos um motor desse movimento nenhum sentido veja aqui o sinal de matemática ficou positivo na próxima ele se inverte então vejo que o sinal ficou negativo estamos com 10 volts por gratidão aqui nos dois canais e num sinal de matemática então nós temos aí uma gramática lula vertical e mais um pouco de nos considerar a 1 12 volts na próxima nós temos o pwm como você está vendo e depois o pwm invertido ou seja tudo funcionando coerente os sinais a ponte
h também então exatamente como previsto agora só falta testarmos se ela vai ser capaz de movimentar o motor de forma satisfatória tá aí galera o teste definitivo com o motor dc então estamos na primeira função aí o arduino pra mim eu clicar uma vez o motor está gerando em um sentido crítico novamente ele vai inverter público novamente temos uma velocidade reduzida e clico novamente em velocidade reduzida em outro sentido e por fim a parada do motor como podemos ver funcionou certinho a nossa lógica da ponte h agora como uma fita para facilitar a nossa visualização
galera vou deixar rodando por um tempo está rodando aí [Música] e vamos observar o aquecimento aí nos transistores como podemos ver 24 graus celsius como não há problema algum e funcionamento do motor [Música] vamos inverter o sentido de rotação no próximo clipe votação invertida [Risadas] em sentido anti-horário perfeitamente agora vamos reduzir a velocidade com o pwm agora ficou bem perceptível né estamos em uma rotação mais baixa do motor em sentido horário em sentido anti horário ea parada vamos checar o aquecimento os transistores continua tudo aí 24 graus celsius tem está muito bom que é isso
galera estes foram os experimentos é bem rápido de testar uma ponte h faça as suas análises recomendo que monte circuito aí que realmente é bem útil você pode montar uma ponte a ligar para o seu robô móvel um circo inversor alguma outra aplicação e já de quebra aproveitar este código par do hino e utilizei o promicro mas o código você viu né facilmente você converte ahipar lino uno ou até mesmo aproveitar o mesmo algoritmo para outros sistemas ou outros microcontroladores como piqui com a br puro fica e também como exercício como dica agora aguarda claro
o seu comentário aqui embaixo seu feedback é sempre importante demais eu peço sua opinião sobre as vídeo-aulas essa clássica de sexta é sempre feita com todo o carinho assim como os demais vídeos do canal como você sabe mas a classe que reúne muitos conteúdos estudados os demais vídeos né então peço sempre o seu feedback que isso nos ajuda pra caramba mas uma clássica de sexta o seu wr kitchener esse foi mais um vídeo de engenharia eletrônica na sua clássica viola de sexta deixa ele lá é que clique em gostei isso nos ajuda bastante é novo
por aqui seja bem vindo aqui tem amplo conteúdo mais de dois mil e 500 vídeos entre cursos séries projetos e tutoriais isso engenharia o uso intencional a ciência me siga também nas redes sociais têm instagram tem twitter que tem a fan page wry facebook ótimo final de semana a todos aquele abraço e até a próxima