Vamos admitir que V é um subespaço de RN e em V temos uma base b composta pelos vetores v1 V2 e assim sucessivamente até o VK é uma base então com dimensão k subconjunto de V espaço que está em RN bem Isto significa que se eu tiver um vetor a em V então o vetor a é uma combinação linear dos vetores da base b Ou seja é uma constante 1 multiplicando v1 mais uma constante real 2 multiplicando V2 e assim sucessivamente até a constante k multiplicando VK as constantes C1 C2 C3 até ck são então
chamadas de coordenadas do vetor a em respeito à base b Esta é a definição que nós temos para coordenadas de um vetor em um subespaço vetor o vetor a pode então ser representado Assim entre colchetes e as suas coordenadas aqui C1 C2 ck em respeito a base b então nós indicamos aqui o b para dizer que estamos representando o vetor a com as coordenada C1 C2 k na base b aqui Vale observar que na base b nós temos k vetores e k pode ser é tão grande quanto n ou seja ter o mesmo tamanho de
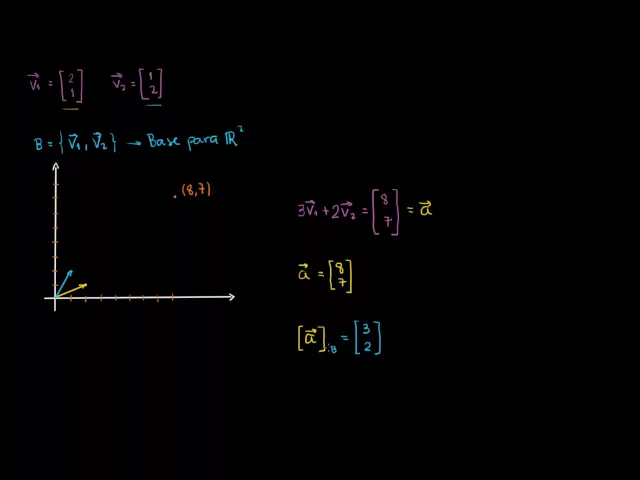
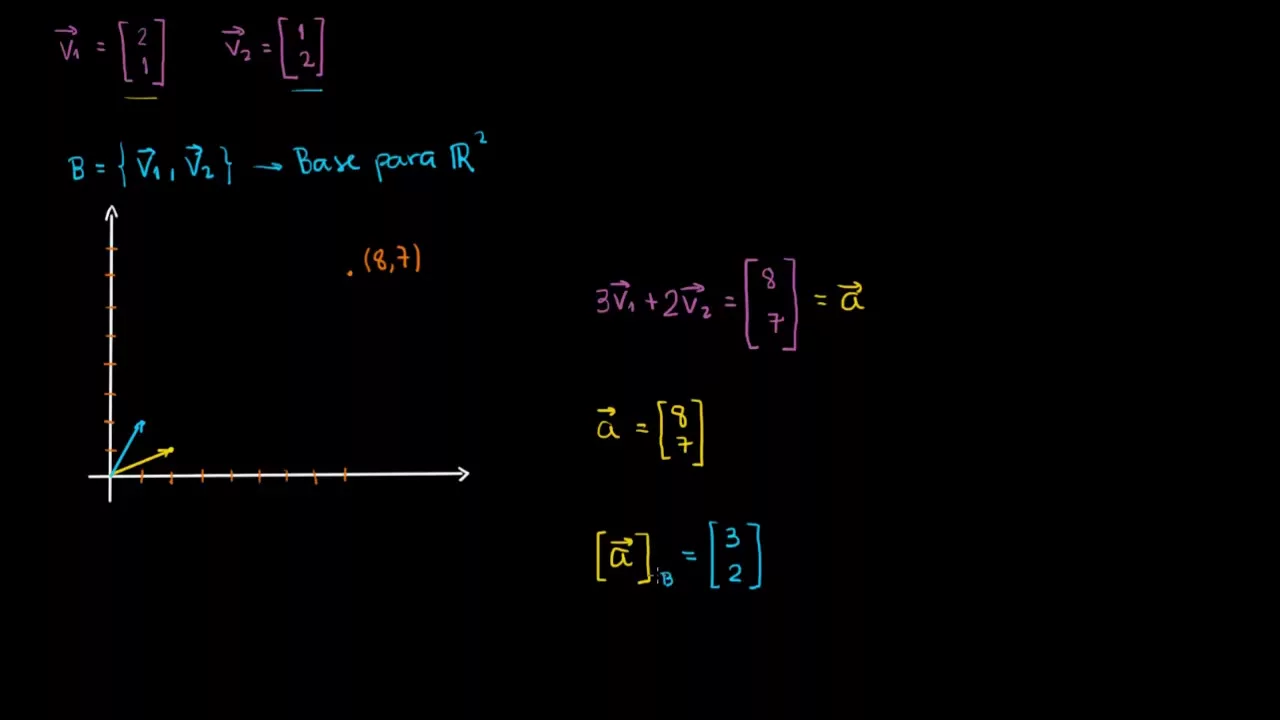
n mas também pode ser algo menor por exemplo em R3 nós poderíamos ter uma base de apenas dois vetores seria um plano em R3 Observe aqui nesta situação que o a é um vetor mas em respeito à base b eu só preciso de k vetores para representá-lo vamos interpretar isto um pouco melhor com alguns exemplos Vamos considerar um sub espaço e dois vetores v1 2 1 e V2 1 2 Vamos definir a base b o conjunto que define a base b justamente por v1 e V2 Note que essa base b é uma base para R2
R2 tem duas dimensões quer dizer qualquer vetor de R2 pode ser escrito em termos de v1 e V2 nós temos aqui então uma base composta por dois vetores da base e são linearmente independentes esses dois vetores são linearmente independentes você pode checar isto vamos localizar graficamente esses dois vetores aqui teria o eixo vertical aqui o eixo horizontal nós teríamos aqui para o 2 1 vamos ver aqui 1 2 aqui 1 2 2 1 aqui o 1 e aqui o do do 1 seria este vetor e o 1 2 vamos marcá-lo em azul este seria então
o vetor 1 2 aqui está vamos escolher aqui um vetor qualquer em R2 que seja uma combinação linear de v1 com V2 vamos escolher por exemplo três vezes o v1 mais duas vezes o V2 isso nos daria um novo Vetor aqui vamos ver 3 x o v1 mais 2 vezes o V2 então 3 x 2 dá 6 2 x 1 dá 2 6 + 2 8 depois aqui 3 x o v1 3 x 1 3 + 2 x 2 4 3 + 4 são 7 Este é um vetor 3 v1 + 2 V2 vamos representá-lo
graficamente do modo tradicional é o vetor 8 7 temos aqui então 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 o ponto que o representa seria este este então é o vetor 3 x o v1 + 2 ve o V2 eu vou retirar a representação do vetor para que nós façamos olhando também para a base b Lembrando que esse ponto aqui é o ponto 8 7 vamos dizer que este seja um certo vetor A então o vetor A é igual a 87 nós sabemos que o a é uma combinação
linear dos vetores da base veja 3 x v1 + 2 x V2 nós podemos escrever então o vetor a em respeito à base b ou na base b na base b esse vetor é igual então a 3 2 3 2 3 x o v1 mais 2 x o V2 de acordo com o que nós definimos aqui sendo v1 e V2 os vetores da base b então em respeito à base b ou em relação à base b ou na base b o vetor a tem as componentes 3 2 representar graficamente então este vetor tem que eh
com relação à base b nós temos que levar em consideração que nós estamos adotando um novo sistema de coordenadas Veja a primeira coordenada do vetor a vai ser múltiplo vai ser um múltiplo do vetor v1 aliás de qualquer vetor na base b a primeira coordenada é o múltiplo do v1 e a segunda coordenada é o múltiplo do V2 no caso deste exemplo a primeira coordenada na base b é TR Ou seja é três vezes o vetor V1 o vetor v1 é o que está aqui em amarelo três vezes ele quer dizer bom Aqui está o
vetor v1 a abscissa dele no sistema cartesiano tradicional que nós usamos era 2 ao multiplicar por 3 veja temos aqui ó 3 v1 iremos para o seis então 1 2 3 4 5 6 aqui é o 6 e a segunda coordenada dele do v1 era 1 multiplicando por 3 vai ficar 3 3 olha só então o 3 da base b é 3 vezes o v1 que teria na base comum entre aspas que nós estávamos utilizando teria abscissa 6 1 2 3 4 5 6 e ordenada 3 aqui estaria O que quer dizer que eu tomei
este vetor amarelo e multipliquei por TR aqui eu tenho ele uma vez aqui duas vezes e aqui três vezes isso é o 3 V1 é o 3 da base b então na base b a primeira coordenada pertence sempre à reta que passa na direção do vetor v1 aqui é uma vez o v1 aqui são duas vezes o v1 aqui três vezes o v1 aqui teríamos quatro vezes o v1 e assim por diante a reta que passa pelo v1 é o novo eixo da primeira coordenada nessa base b melhorei um pouco a reta nesta reta Aqui
nós temos a primeira coordenada do vetor escrito na base P pro caso do vetor a a primeira coordenada é 3 Então a primeira coordenada dele estaria aqui ó 1 2 3 seria esta aqui a primeira coordenada do vetor a da mesma forma a segunda coordenada envolve múltiplos de V2 bem então aqui eu teria que fazer a mesma análise para o vetor V2 se eu duplicar o vetor V2 aqui eu teria duplicado triplicado imagine eu colocando ele na mesma direção continuando aqui eu vou formar uma nova reta na qual nós teremos então a segunda coordenada o
eixo da segunda coordenada na base b nesta reta Azul então nós teremos o eixo da segunda coordenada de qualquer vetor escrito na base b aqui seria o um o 2 o TR e assim por diante no caso do nosso exemplo a segunda coordenada é dois que seria esta aqui para localizar pontos nesse novo sistema de coordenadas em que os eixos são estes dois aqui eu devo usar a mesma ideia que eu já usava quando trabalhava com os eixos cartesianos tradicionais Qual é a ideia traçar paralelas a um dos eixos cruzando o outro eixo e vice-versa
E aí então localizar os pontos nesse caso aqui paralelamente ao eixo Amarelo traço retas que passam por todos os pontos eu posso imaginar do eixo azul eu vou traçar por onde eu marquei os pontos em branco que são os números inteiros que agora serão suficientes para nós então 1 2 o 3 qu e assim por diante lembrando naturalmente que essas retas são infinitas então elas estão para cá também agora Faço o mesmo para outro eixo são as retas azuis paralelas ao eixo azul passando Claro naturalmente cruzando o eixo Amarelo vou usar como referência novamente os
pontos que eu já marquei paralelamente ao eixo azul vamos localizar então o ponto que nos dá eh o extremo do vetor determinado por 32 ou seja a primeira coordenada é 3 Segunda coordenada é dois para isso que eu vou fazer primeiro no eixo amarelo que é o eixo da primeira coordenada eu vou localizar o três e Aqui nós temos o 1 aqui o 2 aqui o três e no eixo da segunda coordenada nós vamos vamos precisar localizar o dois então aqui é o um e aqui é o dois bem a paralela ao eixo azul que
passa pelo três deve encontrar a paralela ao eixo Amarelo que passa pelo dois do outro eixo Então seria esta aqui encontrando esta aqui Opa vai encontrar exatamente no ponto 87 que nós já esperávamos Observe que aqui podemos analisar quantos espaços nós fomos em uma direção primeiro na direção do eixo amarelo que é o eixo das primeira coordenada três espaços porque a primeira coordenada era três depois dois espaços no eo da segunda coordenada e muito bem seguindo Então as paralelas a cada um dos eixos onde elas se cruzam é o extremo do vetor que nós estamos
procurando é por este motivo então que nós temos aqui as coordenadas desse vetor na base b em respeito à base b bem já que estes números se chamam coordenadas em respeito à base b Qual é a relação que isso tem com as coordenadas Que Nós já estávamos habituados a usar antes para isso vamos tomar como exemplo um certo vetor B minúsculo aqui cujas coordenadas sejam 3-1 do modo tradicional graficamente nós teríamos a representação desse vetor aqui 3 no eixo horizontal menos um no eixo vertical Seria algo como isto esse seria o vetor B por que
é que nós chamamos o 3 - 1 de coordenadas de acordo com a definição mais precisa dada antes por que é que nós já chamávamos assim o 3 - 1 de coordenadas Porque nós já usávamos uma base para localizar os pontos para localizar os vetores veja só vamos usar dois vetores chamados de E1 igual a um z0 e o vetor E2 igual a 01 Vamos definir S como um conjunto composto pelos vetores E1 e E2 s é o que nós chamamos de base padrão para R2 basta você analisar que o E1 é o 1 na
direção horizontal no eixo horizontal e o E2 é um na vertical e todos os vetores de R2 são escritos em termos de uma combinação linear do E1 e do E2 um vetor XY qualquer pode ser escrito como x mli E1 mais o y multiplicando E2 ou seja se nós quisermos escrever o vetor XY qualquer com respeito à base S dada ali acima ele vai ser igual ao que nós definimos como coordenadas no início desse vídeo ele vai ser igual Então à coordenadas X Y ou seja as coordenadas com as quais nós tradicionalmente já trabalhávamos há
muito tempo coincidem estão de acordo com a definição mais rigorosa de coordenadas daqui do início do vídeo o que nós podemos é usar um pouco ainda mais de precisão e dizer que estas coordenadas São coordenadas em relação ou em respeito a base padrão e essas aqui seriam Então as coordenadas padrão veja então que nós não precisamos mencionar isso todas as vezes mas as coordenadas tais como nós já as conhecíamos anteriormente estão em relação a uma base chamada base padrão e fica tudo isso uma definição perfeitamente consistente até o próximo vídeo