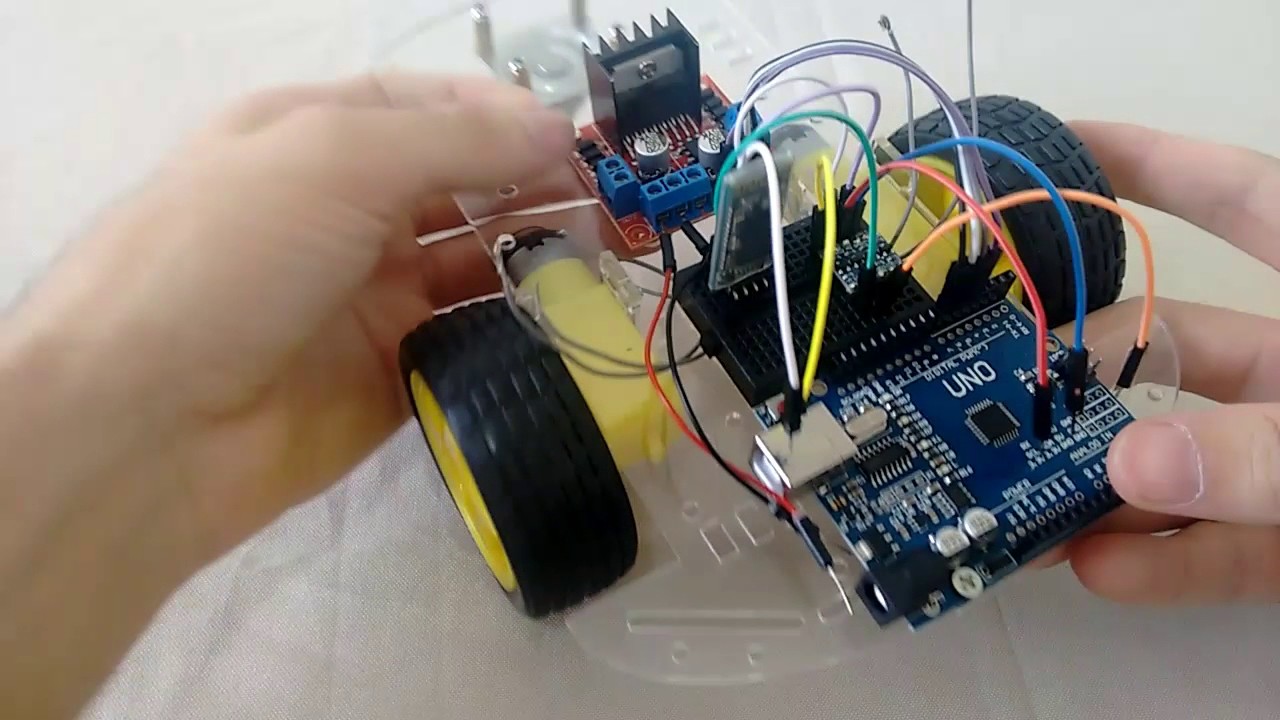
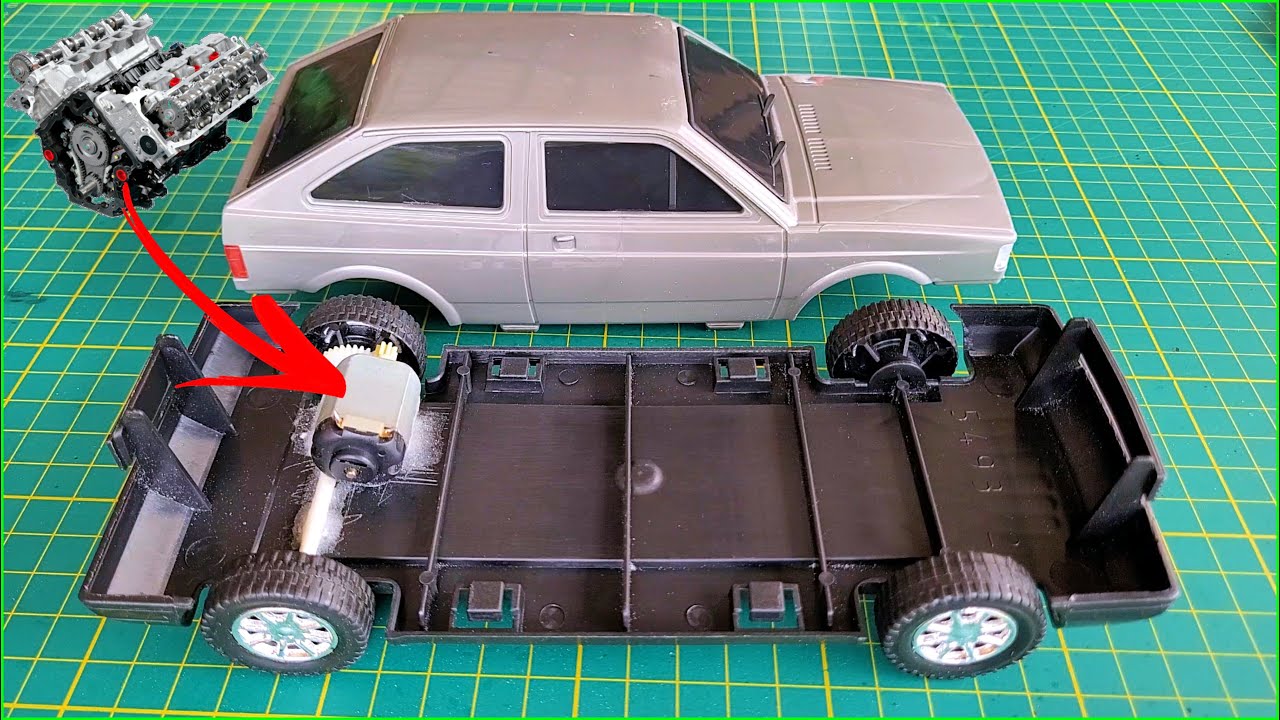
hoje no nosso curso de adriano nós vamos construir um carrinho controlado pelo celular via bluetooth se você ainda não inscrito em nosso canal peço que por favor você se inscreva clique no sine para não perder mais nenhum vídeo é claro ajuda o nosso canal clicando no jóia e seguindo a gente nas nossas redes sociais agora sem mais demora vamos à prática é logo depois de vinheta rodei [Música] bom pessoal então vamos lá aos detalhes da montagem aqui do nosso primeiro carrinho aqui de controle remoto aqui do curso que é a mesma base que nós utilizamos
no projeto passado então quando alguns detalhes rápidos aqui porque a gente já conhece nem eu já mostrei isso aqui pra vocês a base em chapa de pvc certo já mostrei inclusive um link que ensina como fazer essas chapas estamos utilizando que quatro motores com caixa de redução dois de um lado e dois do outro lado certo como controlador de motor nós estamos usando o driver de ponte a guiar nossa deixa tenta focar e aqui dentro tá aqui ó certo é esse driver zezinho que eu vou deixar é já está no carro e aí a os
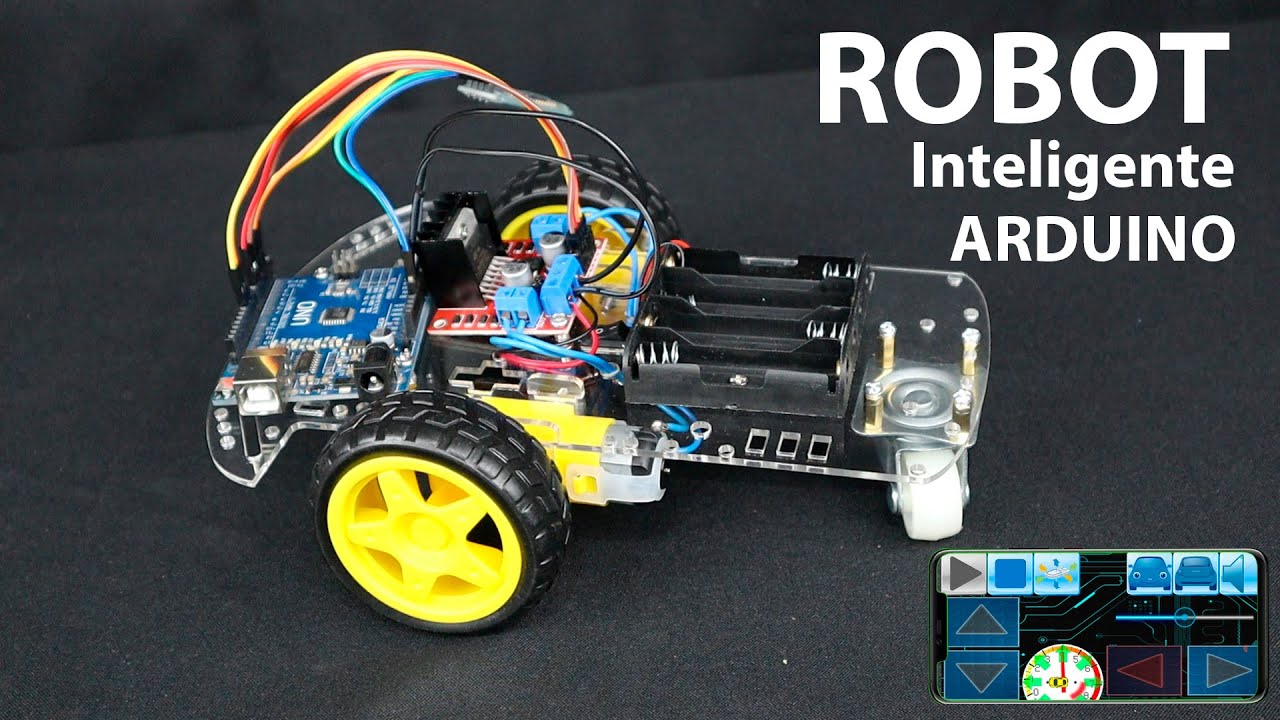
links para essas aulas sala onde nós vemos o promotor sobre o driver para alimentar o arduino nós vamos usar a bateria de 9 volts e para alimentar o botou o motor nós vamos utilizar duas baterias iguais é essa aqui ó de 4.2 volts cada certo de 8.800 million peles é uma bateria ótima pra gente trabalhar com componentes que exige uma carga maior então esse é essas duas baterias que alimentam os motores através da ponte h do módulo driver neto não subtrai de ponte h e orgulho vai ser alimentado aqui com a bateria 9 volts estamos
usando aqui o hc 06 certo que é o módulo receptor modo escravo bruto que vai receber o sinal do celular já vimos aprendemos também como utilizar esse carinho aqui e de acordo com a nossa ligação nós vamos seguir aqui e verificar que o nosso modo luta ligado diretamente nas portas xx isso significa que nós temos que tirar a alimentação certo do nosso circuito do nosso é chipp aqui do broto do nosso módulo bluetooth para poder fazer a transferência dos dados porque senão vai haver um conflito a gente não vai conseguir transferir os dados depois de
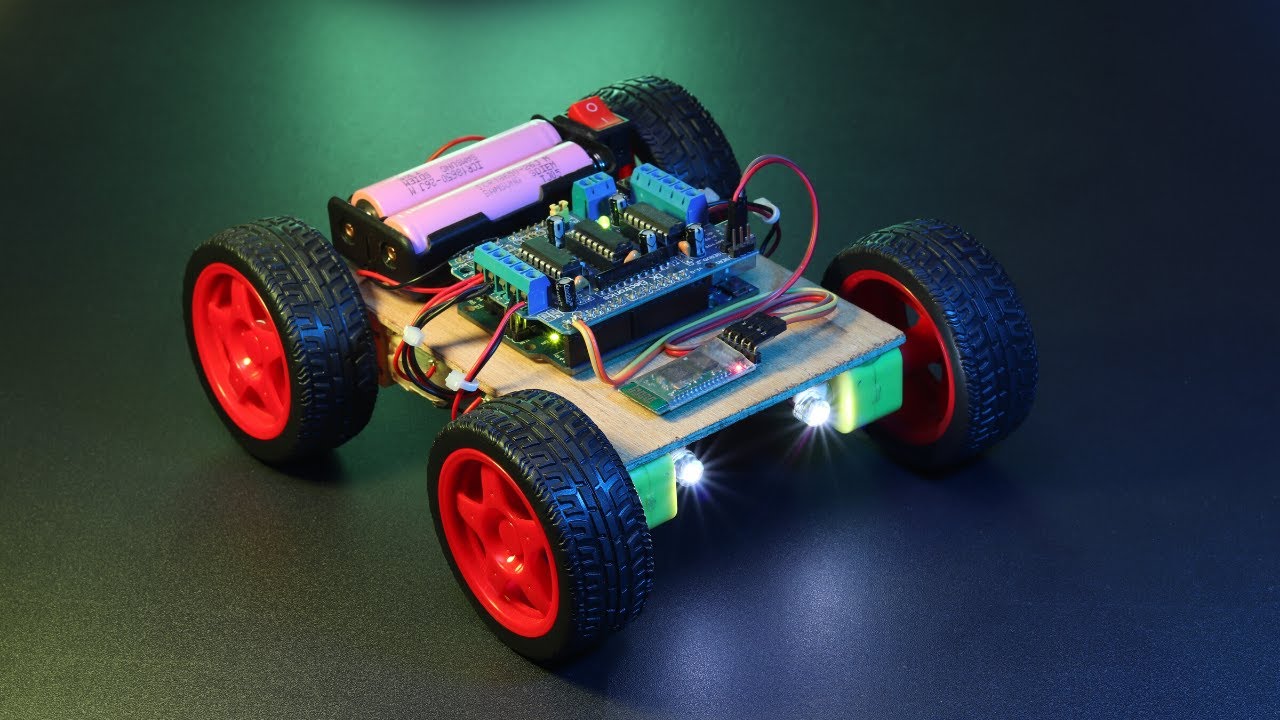
transferidos os dados a gente remove a usb certo alimenta que o nosso luto deixa eu ver que está ligado à italiana aposta certa alimenta a próxima bond verdade é que vai alimentar que o nosso o nosso módulo bruto ea gente liga a a alimenta que o arduíno com a bateria de 9 volts ok então esse é o detalhe são os detalhes da montagem da nossa base essa base nós ainda vamos utilizar para outros projetos está nós já utilizamos para um projeto anterior que aquele é que era movido a demtech ok era movida autônomo né aonde
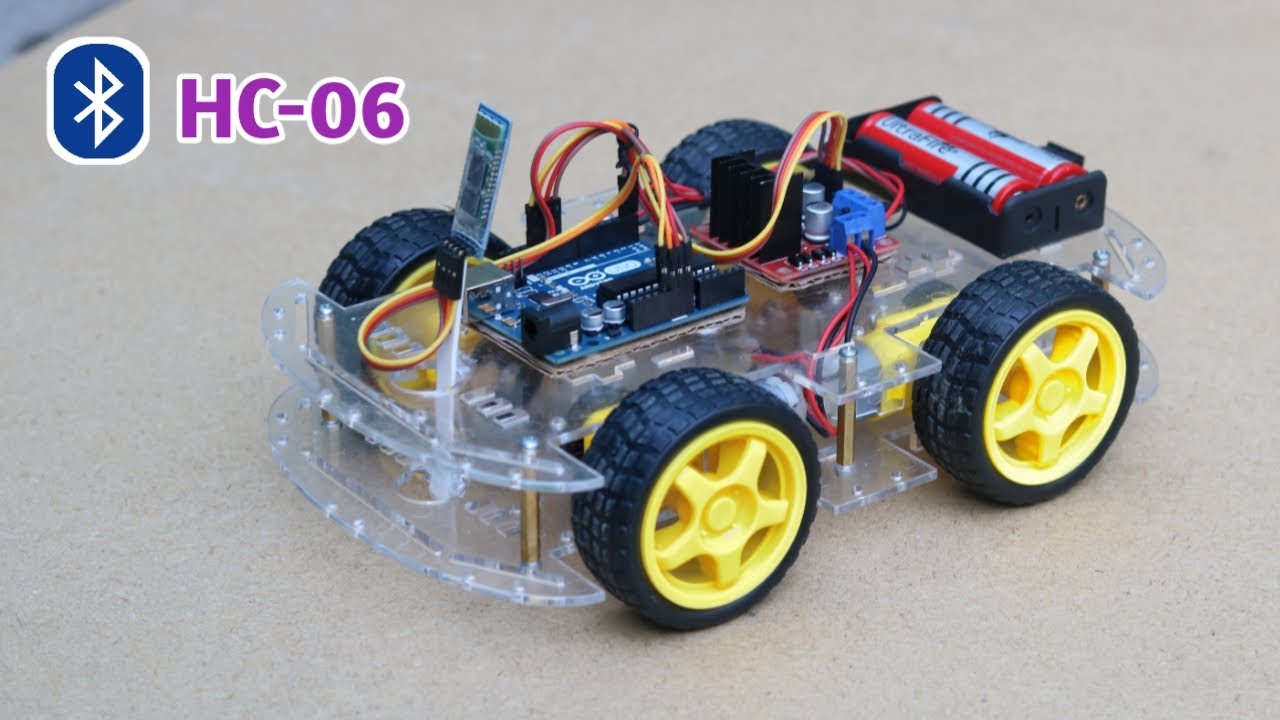
a gente utiliza um sensor ultrassônico conservo que verificava a distância do obstáculo né quando ele achava obstáculo e verificar o tomador beneficiário do outro e seguia para o lado livre ok então nós simplesmente removemos essa base okay ficar fixada aqui ó certo e vamos utilizar agora sem a base com bruto depois ainda é pra outros projetos nós vamos fazer outras adaptações aqui mas deixa eu chegar aí nessa época que a gente vê tudo certinho vamos ver a programação desse cara aqui em bora pra prática então muito bem pessoal então já viu ea montagem do nosso
carrinho de controle remoto vocês não é que utiliza a mesma base que nós fizemos no do projeto anterior o carro autônomo e usava o sensor ultrassônico a diferença que eu remover o sensor minha parte do sensor ultrassônico e agora estão utilizando o módulo hc 06 bruto para receber o sinal do celular em termos de programação não tem nada de novidade tudo que a gente vai colocar nesse programa nós já vimos nosso curso nós já vimos a parte de motor nós já vimos a partir de blur o que nós vamos fazer é adaptar pra funcionar tudo
em um código só beleza só aqui na nossa playlist de arduino nós vimos aqui na aula 56 nós falamos sobre o módulo hc 06 modo bruto eu já nem vou abrir exatamente esse código aqui das 56 nós vamos utilizar e nós vamos também nós vimos aqui na aula deixa eu pegar aqui eu não me lembro que foi à aula onde nós vemos o módulo é o trailer ponte a gal e 29 80 foi nova 22 certo nós estamos utilizando esse módulo nosso projeto só que o código nós fizemos aqui nasce na 49 certo na aula
49 nós fizemos o código que a classe para controlar o motor então vão abrir também aqui a 49 aula 49 o arquivo da oma 49 né bicho abrita aqui e agora nós vamos pegar tudo isso daqui certo e adaptar ao nosso novo programa então vamos lá primeira coisa que nós vamos fazer é parte do motor que vai ser exatamente igual essa aqui ó então da do arquivo da aula 49 nota é que eu vou copiar tudo ó teto não né até aqui ó o setap também até o setap eu copiei certa o que a gente
vai precisar que o control c eu vou colar no arquivo da aula de hoje que a aula 62 então substituem todo esse conteúdo aqui com o setup aqui está o controle do motor onde nós desenvolvemos o código que vai dar pra frente pra trás então se você perdeu essa aula e recomendo você assiste aula 49 eu vou deixar aqui no card e na descrição do vídeo beleza então nós já vimos isso daí não tem novidade nenhuma pra gente aqui na aula 56 nós trabalhamos com o módulo bluetooth certo nós trabalhamos aqui com led aquela coisa
tudo o que nós vamos precisar aqui pra esse pra esse código nós vamos para a prova de hoje nós vamos usar isso aqui onde inicializar o serial certo e dessa rotina que então nada de muito sofisticado que a gente também já sabe trabalhar com isso daqui não vou copiar e colar aqui no nosso lupi aqui no setup então vão inicializar a porta serial seriam begin 9 600 beleza andar aqui tudo que a gente precisa agora nós temos que adaptar o nosso código aqui na leitura do bluetooh beleza então nós vamos controlar é de acordo com
o nosso muito com o nosso controle que nós já vimos deixa eu ver qual é o que nós vemos o controle é que a fraude bruto nas 56 não deixou ninguém aqui de novo 56 tá aqui o nosso programinha esse aqui é o controle ea gente vai usar certo então nós vamos comandar os motores por aqui ok para frente para trás para a esquerda para a direita e nós vamos colocar 100 ao quadrado aqui como o botão que vai parar o motor até então a gente vai trabalhar simplesmente tanto o comando eu vou pressionar mudar
o comando ele vai mandar o o o motor girar pra frente eu não vou ficar precisar manter o botão pressionado para parar nós vamos utilizar um quadradinho depois nós vamos mudar isso aí tá certo então daqui vamos voltar aqui para a pasta da aula de hoje 62 e jóia vamos ao nosso programa qual parte que nós vamos mudar aqui vai ser o seguinte nós vamos ler normalmente certo aqui há o que está vindo da serial vamos armazenar aqui em ser a nossa rotina e fi vai ser um pouquinho diferente nós vamos ter que fazer uma
configuração diferente no nosso controle então nós vamos fazer o seguinte deixa abrir a fatinha de novo dele aqui a 56 essa aqui né nós configurado a seguinte maneira nós vamos configurar pra é pra frente nós vamos configurar esse comando que vai ser relacionado e vai enviar o carácter rf esse aqui vai ver o karatê esse aqui vai enviar o karatê é e enviou carta tfd ok efe de frente e de trás é de esquerda de direito de direita e essien e enviar o caracter p de parar tá certo esse aqui vai ser o mapeamento que
nós vamos fazer no nosso programa nessa aula aqui eu mostrei como a gente faz exatamente isso daí então vamos lá quando vier o comando efe o que eu tenho que fazer eu tenho que mandar o técnico comandar o meu motor pra ir pra frente certo não vamos lá que a gente comanda o motor pra ir pra frente basta a gente definir a função frente tanto do motor esquerdo quanto do motor direito roma motor direito chama que o método frente e passo a velocidade para ele nós vamos colocar tanta velocidade maior que a 1 255 certo
velocidade véu esse método aqui nós fizemos aqui na classe motor aqui aos métodos frente traz para freia e comandar esquerda direita é simplesmente dois motores de um lado pra frente os dois motores do outro para trás certo e ele faz um giro e dólar é pra frente são os dois motores neo esquerda motor quis que meu direito e outro esquerdo frente ok mais um e foi aqui onde nós vamos verificar quando o comando te vi é quando o comando teve é significa que ele vai para trás então nós vamos chamar que o método traz traz-nos
2 traz os dois motores para trás ok isso aqui ó quando vier o comando é significa que eu preciso e para a esquerda a gente para a esquerda nós vamos comandar o motor esquerdo para frente a frente eo motor direito para trás beleza quando viam o comando de significa que eu quero ir para direita para a gente como mandar pra direita mas se o motor direito para frente e motor esquerdo para trás quando vier o comando p significa que eu quero parar para então nós vamos chamar que o método para dos dois motores que o
método para a gente ver que ele não precisa receber o parâmetro é só a gente simplesmente chama o método para atrair gente tá aí a programação do nosso carrinho de controle remoto beleza não tem nada de diferente do que nós vimos na parte de motores a meia hora que aqui eu nem preciso a vinda que eu não preciso desse é desse temporizador certo deixa eu ver se os pinos são os mesmos não sei por que não demitiu mudou na montagem não é exatamente a mesma coisa então não tem nada de novo também nós reaproveitamos tudo
que nós já fizemos e adaptamos aqui ao trabalho com bruto só lembrando e aí nós estamos utilizando o nosso módulo hc 06 ligado na em xxx para poder fazer o envio do código a gente tem que desligar certo tirar alimentação do módulo sob o solo mental o módulo depois que o código já tivesse sido transferido beleza que se não vai dar conflito e eu não vou conseguir fazer a transferência do código então agora vão ficar com o vídeo aí pra gente ver o nosso carrinho de controle remoto funcionando bora prática a lei que nós estamos
fazendo chega para trás daqui de rendimentos o que está fazendo elas estão testando o carro que funciona pelo celular nem isso o nosso controle em tela do celular e nós vamos controlar o nosso carrinho pelo furto pelo bruto nacional quando chávez virá na frente e aí vão pará-lo tira a i e ii funciona nossa nem eu sem você aqui sem você fica aí a falar o carrinho da jóia isso