[Música] Oi pessoal na semana passada na semanas passadas Nós aprendemos várias métricas de desempenho e de estabilidade então a gente já sabe o critério de Rolf de night nós vimos métricas no domínio do tempo no domínio da frequência nós temos várias ferramentas para a gente conseguir agora ó projetar o controlador então nessa aula nós vamos entender a importância da ação integral no controlador na redução do erro de regime permanente e a gente vai começar a falar do controlador p e d o controlador p&d que é o mais usado industrialmente tá tem até caixinhas prontas que
você vai lá e tuna os ganhos do p do i e do d Então a gente vai aprender um pouquinho sobre esse controlador nessa aula de hoje então vamos começar falando sobre referências padrão na aula de métricas no domínio do tempo a gente usou o impulso o degrau Então agora eu vou colocar essas essas entradas padrão em um formalismo matemático um pouco diferente tá então eu tô usando esse formalismo aqui do descrevendo essas referências no domínio do tempo agora tá então a gente vê lá nessa equação T elevado a n / n fatorial multiplicando Esse
i aí diferente esse I diferente é a entrada integral que a gente tá acostumado tá E aí eu vou variando esse n e eu vou obtendo diferentes entrada padrões tá então assim n = 0 eu vou obter a entrada degrau unitária n = 1 eu vou obter a reta né uma rampa com inclinação unitária n = 2 eu vou obter uma parábola e aí a segunda der vai ser unitária e assim por diante essas entradas assim com esse padrão e descrevendo isso assim de maneira matemática fica bacana para a gente avaliar a resposta do sistema
lá no Laplace então fazendo a transformada dessa função no tempo para o Laplace a gente tem essa essa função aqui ó de S né então fica um dividido por s n elevado S elevado a n + 1 reparem aí então se eu tiver lidando com degrau a minha entrada vai ser 1 /s se eu tiver lidando com a rampa 1 dividido por essa ao quadrado e assim por diante o nosso objetivo da primeira parte da aula é lidar com erro de regime permanente e entender o papel da ação integral então Vamos definir o erro né
o erro vai ser a diferença entre a referência e a saída e a gente vai adotar e explorar para esse estudo teorema do valor final que tá Expresso aí tá então ó lembrando dele é o erro quando T vai lá para o Infinito então é o erro de regime permanente ou erro estático e ele também pode ser calculado quando a gente faz a transformada de Laplace desse erro multiplica essa função por s e joga esse limite para zero Então a gente vai usar essa ferramenta para calcular o erro de bom vamos estudar esse sistema aqui
ele tem uma planta H essa planta é a planta ser controlada e o controlador c a gente consegue escrever a malha aberta né que é ch consegue escrever Amália fechada fechando lúpicos bloquinhos Então a gente tem L dividido por um mais L tá aqui eu coloquei um lembrete para a gente lembrar do teorema bom posso encontrar a função transferência entre a entrada referência e a saída sendo erro ao invés da saída ser o y Então como é que a gente faz isso Descreva o erro que é igual né a referência menos a saída vou manter
a referência aqui ó e vou colocar a saída a saída aqui ó é igual a função transferência vezes o r ó passei o r para cá tá aqui ó vou colocar o r em evidência colocar para baixo né eu encontro aqui ó a descrição do erro em no domínio do Laplace em função aqui da minha referência tá então eu já tenho essa função para poder usar ela lá no teorema do valor final Então vou colocar essa esse erro aqui ó joguei aqui não esquecendo do s o que eu quero fazer agora é substituir a referência
não vou deixar ir em função de s mas vou colocar as nossas entradas padrões aqui é o degrau a rampa então eu vou substituir esse R por 1 dividido por S elevado a n + 1 tá então esse mais um vai cortar com esse s e eu acabo ficando com essa função aqui de n para eu traçar o limite tá então fica S elevado a n multiplicando um mais a malha aberta lá no denominador bom então a gente já sabe que a gente pode estudar o erro quando a gente vai mudando a entrada agora eu
vou querer dar uma olhada com carinho na malha aberta nesse l e o que que eu vou estar atenta é quantos polos na origem e esse sistema tem bolos na origem eles têm Essa é um sobre S né são quando eu faço igual para equação característica Esse é o Polo na origem o Polo na origem também pode ser caracterizado interpretado como ação integral porque 1 dividido por s é a transformada de Laplace da integral então facilita aí a nossa vida então eu quero entender o papel da ação integral ou do Polo na origem no erro
de regime permanente Então vamos lá ó toda escrevendo aqui ó a minha malha aberta eu isolei os polos na origem e o resto dessa malha aberta esse resto eu chamei de ele zero e coloquei aqui os polos Então essa função transferência de malha aberta tem polos na origem Olha é ser levado AK vou colocar essa malha aberta lá no meu limite do erro de regime permanente tá pessoal então o que que eu posso fazer agora posso fazer um estudo alterando o n e o k né faça essa distribuição na verdade e vou investigar como que
esse limite funciona de acordo aí com os valores de n e de k então se eu tenho o k maior que o n o meu erro vai para zero ah Professor então a senhora tá falando que se eu tiver uma entrada degrau que o n é igual a zero eu vou precisar de um polo na origem para garantir que o meu erro de regime permanente é zero sim é exatamente isso que eu tô falando então a gente sempre tem que ter ação integral para garantir que o erro de regime ele não não vai existir E
se o n for igual a k aí esse limite vai dar um valor um valor finito tá E aí o meu sistema vai apresentar erro de regime e a gente não deseja isso e pior ainda se o n for maior que k aí o erro vai para o Infinito Então essas duas últimas condições nós vamos tentar evitá-las porque nesse caso o sistema não apresenta uma métrica adequada de desempenho tá então você pode você mesmo pode conferir no programa erro regime esse gráfico tá é um gráfico que vocês já conhecem todos os comandos então eu criei
a função transferência duas funções transferências de malha aberta uma a primeira aqui ó que o k é igual a zero não tem Polo na origem e a segunda com um polo na origem fechei a malha usando o comando feedback e calculei a resposta ao degrau usando o comando step response e é esse gráfico aqui que eu obtive tá então nessa imagem aqui você tem as duas malhas fechadas para para ilustração bom essas duas respostas O que que a gente pode ver quando k = 0 quando a gente não tem Polo na origem a gente tem
um erro de regime permanente para esse caso o erro é meio e ele se mantém indefinidamente Isso é muito ruim né pessoal eu não quero um sistema assim eu quero que ele Siga a referência Então esse sistema não está legal o segundo sistema tem um polo na origem e o que que acontece o erro de regime permanente ó some então é isso que a gente quer então será que tem uma regra né alguma intuição assim de definições com relação a esses erros de regime e as entradas padrões Tem sim então esse daqui são definições que
aparecem na literatura e eu quis trazer para vocês tá então ó se o sistema for do tipo k = 0 sem pólos na origem e a entrada for do tipo degrau então n = 0 então k e o n são iguais Então a gente vai apresentar um erro eu jogo lá né no teorema do valor final e calculo o meu erro esse erro Vai ser 1 dividido por 1 mais o valor da malha aberta quando eu coloco essa igual a zero olha só aqui tá esse valor aqui ó do L avaliado no s = 0
ele é chamado de KP ele tem um nome constante de erro de posição tá nós podemos fazer as mesmas definições para os sistemas do tipo 1 e 2 Então vamos lá quando eu tenho k = 1 e entrada igual a n = 1 então rampa caso jogo lá no limite e o meu erro Vai ser 1 dividido por kv esse kv é a constante de erro da velocidade tá bom e quando cai igual a 2 também temos a mesma definição então k = 2n = 2 joga lá no erro a gente tem um dividido por
k a e esse k a é a constante de erro da aceleração então a gente pode construir essa tabelinha esperta aí para a gente tá ligado tá então ó na diagonal a gente tem valores iguais de n e k então apresentam erros de valores Limites Tá então aqui ó na diagonal a gente tem isso quando a gente tem né o n maior que o k o erro é infinito então é a parte superior dessa tabela né E quando eu tenho polos na origem né meu pai é maior que ele nesse caso aqui o meu erro
vai para zero então vamos fazer o resumo eu preciso de ação integral eu preciso de bolos na origem eu preciso que o meu sistema tenha um sobre s para que eu tenha para que eu reduza o erro de regime permanente vocês lembram da aula que a gente conversou sobre imagens eu falei para vocês que a cara da malha aberta né do diagrama de bode na malha aberta tinha que ser assim né ó a gente quer acompanhar referência então embaixo a frequência a nossa malha aberta tem que ser bem grandona e para a gente rejeitar ruído
a nossa malha aberta tem que ser pequenininha isso tá totalmente de acordo com ação integral Olha lá ação integral é 1 dividido por S quando o s ele pode ser interpretado por iomega então quando esse Omega vai ficando pequenininho né esse valor vai ficando bem grandão então a ação integral ela é ilustrada visualizada por valores altos na malha aberta embaixo a frequência Tudo bem então para eu garantir que o meu sistema tenha ação integral eu vou propor controladores que incluam isso tá bom então eu coloquei aqui três tipos de controlador que eu tô colocando para
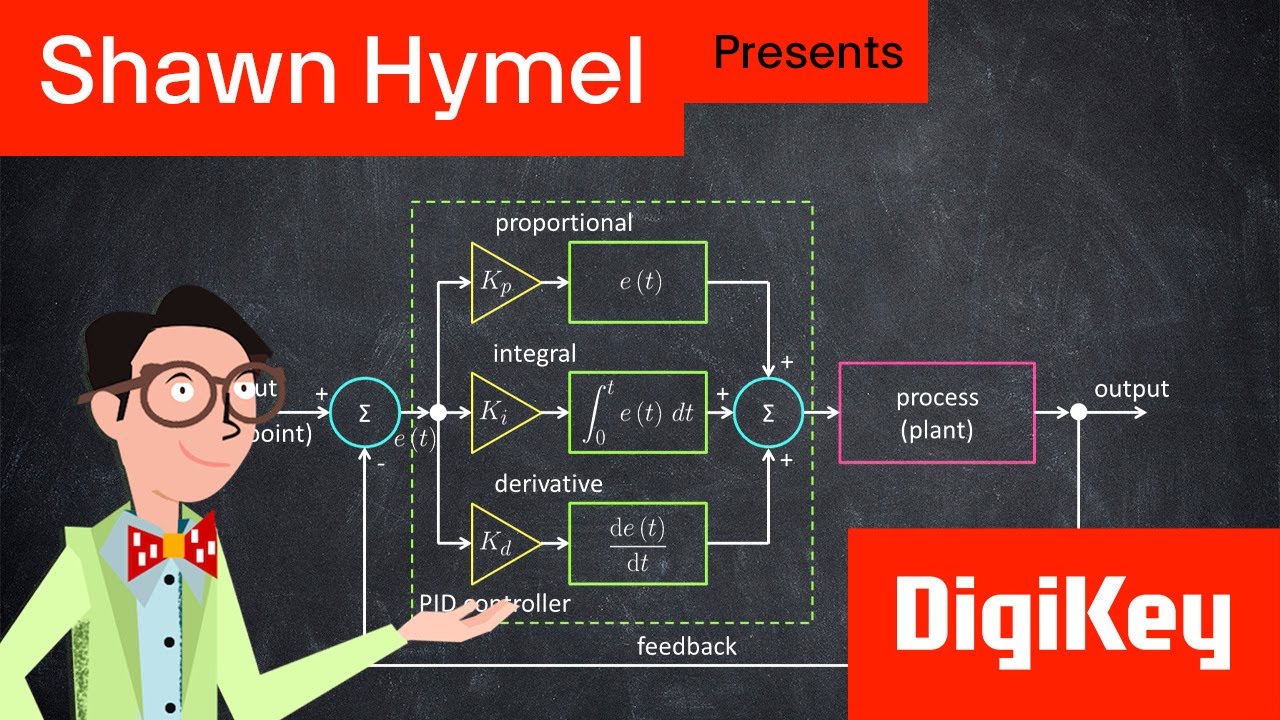
fazer o projeto desse C tá então Ó esse c aqui a minha malha minha planta ser controlada primeiro é puramente integral então eu coloco aqui um ganho integrativo cair dividido por S na literatura você também vai poder encontrar o ti que fica aqui embaixo tá bom tanto faz um dividido pelo outro segundo controlador que eu vou colocar aqui ó pi Então tá vendo eu tô sempre colocando e esse caso aqui ó eu tenho um proporcional e um integrativo bacana terceiro controlador famoso p&d que ele tem as três componentes integral o proporcional integral e o derivativo
então Ó esse primeiro termo aqui ó que tá multiplicado por s é o derivativo o KP proporcional e o que divide aqui o s ó é o Ki tá então nós a gente precisa agora de uma metodologia uma estratégia para eu ajustar esses controles né como eu falei para vocês na indústria você acaba chega encontrando né material que você só vai lá e ajusta esses ganhos então é importante a gente ter uma metodologia e Existem várias disponíveis na literatura tá então antes da gente propor alguma metodologia específica é muito importante que a gente entenda qual
é o papel de cada ganho na resposta do sistema E é isso que eu vou fazer nessa última parte da aula tá então a gente vai olhar cada ganho proporcional integral e o derivativo primeiramente vamos pegar aqui o ganho proporcional então Ó eu peguei essa planta ser controlada só de exemplo tá ela não tem Polo na origem Então ela precisa sim de uma ação integral senão ela vai ter erro de regime e aí eu coloquei fechei a malha com ganho proporcional então no programa A gente já vai daqui a pouco você vai ver isso Ó
eu fechei a malha com ganho de um de 10 e de 100 fui aumentando esse ganho então o que que a gente vê aqui ó dois gráficos o diagrama de bode dá uma malha aberta e a resposta ao degrau da malha fechada tá então na malha fechada você vê olha lá ó erro de regime permanente conforme você vai aumentando o ganho proporcional até diminui esse erro de regime permanente mas você não pode garantir que ele vai para zero tá sempre fica um resíduo lá e aqui ó no diagrama de bode O que que você vê
nada muda na fase mas a magnitude vai aumentando no seu sistema Então você vai tendo a magnitude muda a frequência de corte muda a velocidade de resposta do sistema né então um k baixo um ganho proporcional baixo meu sistema responde lentamente um ganho alto meu sistema responde mais rapidamente Então esse é o proporcional vamos lá para o integrador Né o integrativo vou usar a mesma planta sem Polo na origem tá aí eu fechei a malha aqui ó essa é a função transferência da malha aberta já com o controlador tá então coloquei aqui ó você pode
ver que esse essa malha aí agora já tem um polo na origem devido ao controlador integrativa Então olha só que diferente né Então temos novamente aqui o diagrama de bode da malha aberta e a resposta bem diferente primeira coisa que você tem que reparar repara que ó na baixa frequência esses valores aí ó da malha aberta Ficaram bem maiores com relação só o ganho proporcional a função de resposta fez assim ó ela deu uma empinada e é isso que a gente quer esse é o nosso desejo e dá para ver isso lá na resposta as
três respostas com qualquer ganho integrativo tem zero erro de regime permanente então ação integral é muito importante agora conforme eu for aumentando em azul a gente tem um em vermelho né 10 em preto sem conforme eu for aumentando o ganho integrativo o sistema vai ficando mais rápido Opa mas oscila mais né então você tem que tomar cuidado aí na mão com o integrador se lascar muito integrador sistema vai responder rápido mas vai oscilar muito tá então é um problema você tem que usar o integrador com critério você tem que usá-lo mas com critério o último
ganha o derivativo Então olha que que a gente tem aqui coloquei aqui o derivativo essa já é a função transferência da malha aberta Considerando o controlador derivativo fechei a malha e calculei a resposta ao degrau e o diagrama de bode o que você vê no derivativo não tem nada de ganho aqui ó na frequência baixa então ele não ajuda em nada no erro de regime permanente e isso a gente consegue ver aqui ó na resposta temporal tá então o erro ficou grandão mas a gente tem uma grande atenuação na vibração então ó Conforme eu fui
aumentando o meu derivativo a vibração tempo de resposta ficou menor com mais lento vibra menos então a ideia eu posso dosar a mão no integrador às vezes eu ajusto o derivativo para segurar um pouco essa vibração Então eles andam esses ajustes andam juntos tá bom então gostaria agora de mostrar para vocês o programa né do ganho para mostrar esses ganhos para vocês esse é o programa que a gente vai dar uma olhada tá então tem uns aqui a nossa planta ela não tem Polo e ela vai ser a mesma planta que a gente vai utilizar
para avaliar o ganho proporcional integrativo e o derivativo primeira parte ó só tem o proporcional Então eu fui mudando de um para 10 e aqui tem a minha malha aberta e a gente obtém o gráfico né da resposta e do diagrama de bode que eu mostrei para vocês lá na aula então o que que eu quero que vocês façam com esse programa alterem os ganhos brinquem com os ganhos Vejam o impacto dos ganhos nesses gráficos tá o segundo ganho que tá aqui no programa é o derivativo tá então esses gráficos aqui também fiz uma malha
aberta já com o derivativo pessoal e eu quero que vocês façam a mesma coisa alterem os ganhos aprendam como o impacto que cada ganho tem na resposta do seu sistema né eu falo brincar porque é isso mesmo que eu quero que vocês fazem alterem brinquem veja o que acontece E aí esse é o último ganho integrativo mais mais importante com relação ao erro de regime permanente e eu quero chamar atenção de novo aqui para vocês que olha como fica bonita a malha aberta aqui ó quando a gente tem um ganho integrativo ela fica empinada ela
fica com o valor bem alto embaixo a frequência muito obrigada pela atenção de vocês até a próxima tchau tchau [Música] [Música]






![ZIEGLER e NICHOLS ✅ Malha Aberta [Controle PID] Parte 1](https://img.youtube.com/vi/wmyQJnTpOls/maxresdefault.jpg)