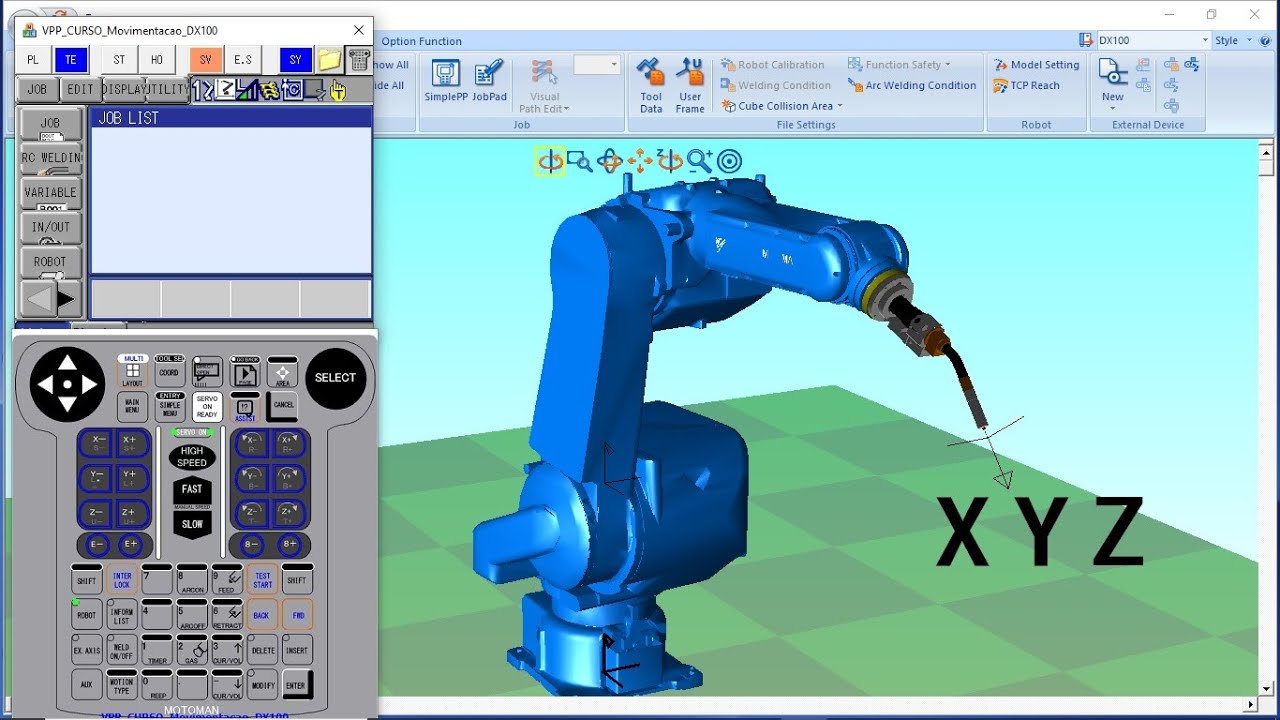
[Música] [Música] olá pessoal do curso técnico em automação industrial disciplina de robótica industrial essa é a nossa terceira vídeo ao roteiro da nossa terceira vídeo aula será sistema de divisão manutenção e segurança nos robôs a visão por computador é um processo de extração e caracterização e interpretação de informações a partir de imagens do mundo tridimensional ou seja você tem 11 na câmara um censo óptico que ele faz a leitura da imagem ou do ambiente aí ele faz uma caracterização em uma interpretação e vai fazer a conversão em sinais elétricos para o processador nos sistemas de
visão você possui 33 peças importantes são os sensores o processador e os atuadores ou seja quando você tem os sensores que fazem a leitura do ambiente e o o programa que é aquilo que você determina que o boi vai fazer aí você faz um processamento das informações e os atuadores ele vem executando com aquilo que você quer que um robô fácil o sistema de divisão ele possui como a gente pode observar uma câmera que ele que ele tenha o campo de visão que vai que um objeto vai passando por ele e lhe valendo é a
forma daquele objeto além de que maneira ele está me e você vai através de seu robô executar aquela tarefa à qual você quer que eles recurso aquilo que você quer que é o seu objetivo então a gente pode ver num sistema de de produção por exemplo empacotamento você vai lá e faz o empacotamento do filme gi e com a câmera você ver se está no nível não se estiver no nível você vai com seu robô que faz o fechamento daquele daquele empacotamento como a gente pode ver né neste vídeo a gente tenha um ou go
onde ele está fazendo é a manipulação de blocos e determinadas cores então o operador dele e determinar se você vai pegar o bloco azul e vai colocar numa determinada posição como a gente vê um robô ele vai exatamente cumprir essa função aí depois ele vai e pega outra o outro bloco coloque enfim sobre o outro sempre fazendo é pega pegando a corpo que o operador de ele determinou então ele utiliza o sistema divisão para identificar com o que do bloco a visão robótica ela possa em várias aplicações dentre ela é o controle de qualidade e
de extensão ou seja você tem um uma câmera lá que ela está fazendo todo o controle da qualidade do seu objeto se aquele seu objeto ou produto ele saiu com água com alguma anomalia no sistema divisão e consegue detectar e entra outro robô para fazer a retirada daquele objeto que não está de acordo com a qualidade que é que é necessário para que o componente sistema divisão ele faz a identificação de componentes por exemplo na montagem de um de uma placa a ele vai lá e escolha o vou pegar agora o parafuso e vou colocar
no lugar eu vou pegar uma porca uma ruela e vou fazer a montagem daquele componente então ele faz isso através do sistema de visão ele identifica a peça que o componente que ele vai montar um sistema de visão e faz também o posicionamento de afeto a dor ou seja se é efetuado ele está próximo ou distante do do que ele quer na tarefa que ele quer realizar então ele veio através do do sistema de visão como por exemplo a indústria automobilística na hora da que está sendo saudado algum componente aí ele vai lá e ver
e determina a velocidade como como aquela solda deve deve ser feita sistema de divisão é para robôs de sal da gen então para controlar o processo de soldagem o robô precisa que o sistema de visão forneça as seguintes informações posição absoluta do arame de solda e da jansen saldada a gente sabe que no processo de soldagem a gente deve manter uma distância relativa entre o arame assim a fpf porque é onde vai ocorrer todo o processo de solda a distância relativa entre um fã o arame as muitas que estão sendo saudado a distância entre a
tocha de soldagem e à superfície a ser saldada e as dimensões da posse de fusão ainda entra outro outro fator também a velocidade ele faz o controle da qualidade daquela salda-se aquela só dela tá assim é realizado da melhor maneira por filho citassem de acordo com as especificações e com aquilo que o que nós queremos aí ele faz todo o controle de si neste processo a visão robótica ela o filho no deslocamento do roubo identificando as barreiras que se encontra no seu caminho como a gente pode ver aí esse robô quando ele vai se movimentar
na parte de cima a gente tenha uma câmera zinha que ela faz a leitura do ambiente ver se tem alguma barreira e emitir final o caminho está livre pode seguir em frente ou se tiver alguma barreira ele sempre vai procurando o caminho que ele pode seguir na frente com relação à manutenção os fatores necessários para execução de um programa de manutenção eficiente são equipe qualificada e treinada você não deve colocar qualquer qualquer funcionário feio pra fazer a manutenção do robô mesmo que seja uma coisa simples deve ser sempre uma equipe qualificada e treinada por que
esse foi um problema simples e você mandar pessoas que não têm qualificação para resolver aquele problema ele pode agravar mais ainda o dano daquele roubo então sempre é autorizar somente pessoas têm nada faça manutenção anos e roubou um programa apropriado de manutenção preventiva é os robôs eles devem ter um acompanhamento especial da onu pessoal de manutenção porque porque se você fosse ficar aparecendo problema e você phuta é prorrogando a a manutenção então futuramente esse robô ele pode ser até então utilizado devido à grande e à grande carga de de falha que já vai investir em
cima dele e uma política racional de automatização dos equipamentos e dos processos então se você tem uma linha de produção possui uma produção automatizada então você deve ter todo um controle de manutenção de cada um daqueles componentes não é simplesmente para todos os componentes realizar todos amanhã a manutenção em todos ao mesmo tempo você vai fazendo um planejamento determinado dia para o primeiro robô no segundo dia para o segundo e assim vai fazendo a manutenção em toda a linha sem parar a produção e na manutenção para detectar a causa de um defeito deve finalizar o
sistema pensando nesses diversos blocos de componentes é você um determinado botar um problema então você faz um diagrama sim de bloco nós vamos ver o futuro é no um próximo islaine e novamente a pergunta que se faz é é afinal de entrada em afinal já é de saída você deve ver é e se esses sinais estão sendo o benefício final aí você vai é mais fácil você determinar onde está sendo um defeito do roubo e na manutenção agora nós vamos ter a noção de true blood to me ou seja a solução de problemas baseado em
um diagrama de bloco de roubo então a gente começa com um controlador a gente está vendo lá e controlar a doutora alba definam os sinais do cérebro amplificado o ferro motorista chega no final está saindo ficar saindo então um problema no cerro motor então a gente passa para mim se for um cervo motor aí a gente vê lá sendo tataco metros e no controlador senão a gente segue o fluxograma e acompanhamento das reduções e nem junto do robô até identificar o seu defeito e quanto maior a potência do robô ea capacidade de operação dos robôs
maior será o risco de acidente ou seja de robôs que trabalham com cargas pesadas em ambientes hostis então a gente tem uma uma probabilidade maior de ocorrer acidentes e os tipos mais comuns são uma nuvem correto ou seja você quer usar o robô para enfim aqui ele não foi destinado você quer fazer a implementação nele mas ele não permite que essa que essa implementação atingia a esse novo filme que você quer então se você fizer manuseio incorreto do robô pode ocorrer um acidente aproximação sem interrupção do sistema toda vez que a gente vai fazer manutenção
em robô a gente deve fazer o desligamento por completo dele porque se ele dá um solavanco pode machucar quem for fazer a manutenção nele paralisação incorreto da máquina toda máquina ela deve ter uma chave geral se você não desativar ela pode ter um problema depois com algum acidente ou e pode ter também um defeito no dispositivo de segurança como a gente pode ver nessa figura o operador ele se aproximou do robô sem que roubou estivesse desligado como a gente pode dizer ainda está até na tomada ali aí o que foi que ocorreu um acidente e
outro ficou até assustado aqui a próxima ação incorreta da máquina a máquina é um carregador automático ele ele se aproximou ea máquina lei o que ele era uma peça e colocou ele na esteira então não a gente não deve fazer uma aproximação do robô sem desligar ele então pessoal essa foi a nossa terceira vídeo aula e essas são as referências que podem ser consultado para possíveis dúvidas [Música]