fala galera beleza aqui ou ali rambo do wr kit xenon e essa é nossa vídeo aula de engenharia eletrônica nossa clássica vídeo aula de sexta aula de hoje eletrônica digital o projeto muito pedido pela galera é o controle de motores de passo em ambos os sentidos de giro utilizando um circuito digital discreto e vamos aproveitar aquele recurso de enquete no youtube eu vou deixar aqui uma pesquisa você volte aí qual tipo de projeto você quer parar vídeo-aula da semana que vem vou deixar as opções um projeto de eletrônica analógica um projeto de eletrônica digital um
projeto com pique o projeto com a dr um projeto com 80 51 clique aqui em cima bote e até ali por domingo ou segunda-feira agora próxima a opção que tiver mais votação será o projeto da semana que vem vamos fazer uma coisa diferente hoje certo que esta viola um oferecimento da toróide do brasil acesse toróide ponto com.br solicite já a cotação para transformadores sonoridades indutores toridades e outros produtos acesse toróide ponto com.br ou deixar o link aqui na descrição e você sabe eu sempre falo aqui que um transformador toroidal tem muito mais eficiência se compararmos
com convencional qualquer projeto que você for desenvolver utiliza um transformador toroidal que vale muito a pena toróide ponto com.br o projeto do controle de um motor de paço convencional esse aqui é o único lar nada mais é do que projetamos um computador síncrono que prevê os cursos a serem aplicados nas bobinas do motor eu vou demonstrar então o projeto de um contador 5 no que eu fiz e permiti a direção em ambos os sentidos de giro ou para a explicação detalhada de sempre e aquele teste prático para comprovar o funcionamento do ex-guia está aberta mas
cheio datasheet do motor de passo que vamos utilizar um motor de passione pulada nmb e o seu sequenciamento lógico a sequência que eu tenho que enviar as suas bobinas é esta aqui então observe que eu tenho que enviar 0 1 1 0 0 1 0 1 1 0 0 1 1 0 1 0 e se eu quiser movimentar no sentido inverso eu tenho que enviar a sequência inversa que está mostrando o sentido de rotação eu preciso projetar um computador síncrono no circuito contrato contador 5 no que me garanta essa sequência aqui com uma lógica digital
então eu já fiz uma vídeo-aula uma festa é são detalhada de como você faz para projetar um contador símbolo para qualquer sequência se eu fosse projetar passo a passo com vocês esse aqui nessa hora ficar com mais de uma hora possivelmente então já ganhei tempo e projetei então qual é a sacada e o projeto um contador 5 no pará é a sequência em um sentido e projeta um segundo computador síncrono para sequência em outro sentido e aí com isso unindo ambos os contadores eu posso verificar quais bits eu tenho que modificar para inverter a rotação
do motor e com isso eu cheguei aqui eu vou deixar aquele aqui como vídeo-aula linkada aqui aquele computador 5 na fé celeste então sugiro que você assista aquela vídeo aula para entender como foi projetado circuito de hoje e aqui está o resultado preciso de 2 c moss o 4030 ou qualquer outro semosp que tenha portas ex hora e quarenta 27 ou qualquer outros e mostra que tenha flip flops e esse aqui é um flop jk com as duas entradas em curto e aí por sorte ambos os contadores correlacionaram se neste link aqui então eu liguei
o pino 13 é o pino 9 se eu coloco um nestes dois pinos temos uma sequência de contagem se eu coloco 0 tenha sequência inversa então com o controle em um único bilhete você pode direcionar a rotação do seu motor e eu vou comprovar isso pra você fazer uma simulação estática aqui no isis vejam que eu tenho este clock e se coloque esses dois pontos são interligados e eu vou aplicar aqui um gerador de pulso níveis ttl para este exemplo e um quilo relax e aqui eu já coloquei voltei de prontos então vamos sim analógico
digital traz uma área do meu gráfico e aí ou menos significativa esse aqui então clique arrasto clique rasto clique e arraste e clique arrasto clique aqui espaço para simular de cima para nós vamos ver as formas de onda vamos dar um zoom aqui na região de interesse mesmo e aí com cursor veja que eu tenho 1 0 1 0 0 1 0 1 1 0 0 1 1 0 1 0 e assim por diante eu projetei para a lógica inversa porque isso simples porque a etapa de potência vamos fazer com transistores bipolares dnpm de média
potência e vamos aplicar na base desses transistores saturando os com isso eu estou enviando 10 para a bobina do motor entender a sacada então ocorre essa inversão de bits por causa da etapa de potência então eu projeto computador síncrono para sequência inversa da tabela do data chip do motor e agora vamos observar o seguinte se eu virar a chave aqui colocar nesses dois pontos e simular de novo a uma outra sequência aqui é mesmo o inverso veja agora que é o 1 0 0 1 0 1 0 1 0 1 0 1 0 1 0
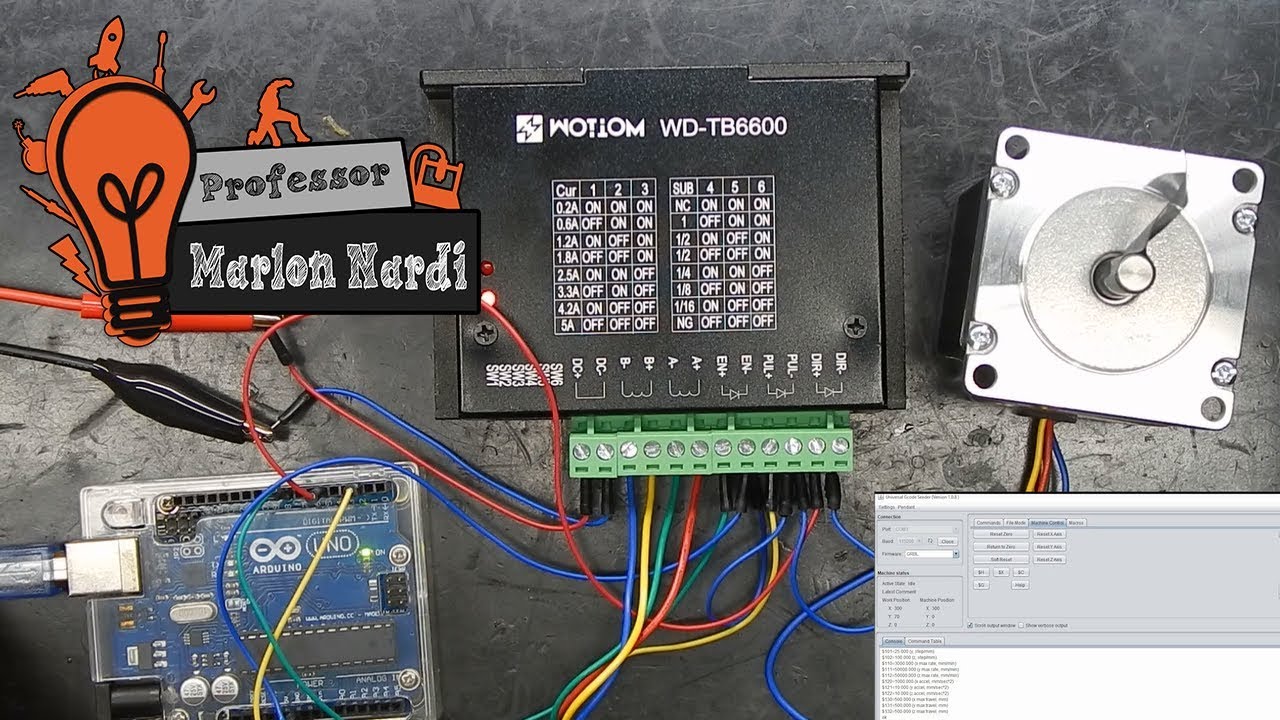
então está funcionando mas vamos é claro primeiro testar isso na prática vamos testar agora na bancada só o computador e verificar os níveis lógicos a saída ver se está ocorrendo assim versão e se a sequência o computador foi projetado adequadamente venha comigo circuito de controle montado já funcionando na bancada veja aqui o 4031 4027 isso todas as ligações conforme o diagrama esquemático já coloquei os dois capacitores de desacoplamento no circuito final eles estão explícitos para você ea chave que seleciona a direção e para testar essa direção como eu infelizmente não tenho um analisador lógico disponível
aqui no laboratório seria mais interessante fazer um teste com um analisador lógico mas eu coloquei aqui uma entrada de clock de meio hertz gerador de funções e coloquei leds nas saídas é interessante salientar que eu estou alimentando o circuito com 12 volts estou entrando com uma onda quadrada de 0 a 12 vôos no clock mas você pode alimentar com cinco voltas no circuito entrará ensinar o tld 5 volts para o clock e aí o seu motor de passo você utiliza uma fonte de alimentação independente sem problema nenhum pois na etapa de potência que vamos ver
daqui a pouquinho você vai estar ligando os 12 volts certinho e podemos observar já o funcionamento do nosso contador 5 num então 0 1 0 1 0 1 0 1 0 1 0 1 0 0 1 agora vamos virar a chave e ele vai inverter a contagem 0 1 0 1 1 0 0 1 1 0 1 0 0 1 0 o show de bola então já vemos que a lógica de controle está funcionando agora sua etapa de potência e conexão do motor aqui que resolvemos facilmente com transistores bipolares de junção de média potência vamos
para mais um pouquinho de teoria de volta no computador estamos aqui com o circuito final do nosso controle de motor de passo aqui está o contador síncrono 40 30 e 40 27 os seus capacitores de desacoplamento são importantes para evitar ruído eu vou alimentar o sistema com 12 volts e aqui em baixo a nossa etapa de potência que é bem simples transistores tip 41 que são bipolares de injunção npn de média potência o revistou de polarização de base e um diodo de proteção então observe as leis bons eu tenho aqui nas minhas saídas blk brno
e rg yw l e essas lembranças estão aqui nas bases dos transistores então a saída do meu circuito lógico aplico nas bases dos transistores e no coletor dos mesmos eu tenho as saídas para as bobinas do motor de passo que eu vou controlar então black brown onde e ela tudo em 12 volts os circuitos hemose admitem 12 volts e aqui estão as bobinas do meu motor eu estou representando no diagrama esquemático por indutores pois sabemos que os motores elétricos são cargas indutivas por isso estes de ouro de proteção também então os fios vermelho bom ligado
a 12 volts e aqui vamos ver mais black brown orde e ela e com isso eu tenho o meu controle de motor de paz união no sentido que eu vou utilizar uma chave simples como você já viu o primeiro teste para selecionar a direção você pode utilizar cinco vôos e circuito aqui por exemplo se você quiser utilizar circuitos ttl você pode substituir mas aí tem que ser em cinco vôos da etapa lógica do projeto e aí não nos drivers neste ponto aqui você coloque em 12 volts o motor também promotora 12 volts beleza acho que
é isso qualquer dúvida e comenta aqui em baixo como sempre o mais breve possível vamos responder e também deixa aquele feedback é muito importante mas antes de encerrar a aula vamos comprovar o funcionamento prático verificar o motor girando nos dois sentidos e você sabe que você pode controlar a velocidade pela modificação de clock aqui e esse clock você projeta ou quer oscilador de onda quadrada então já temos dezenas de projetos de geradores de onda quadrada pode ser com pippa ser com o aluno pode ser com 55 para 1 555 pode ser com você mostra tn
aí fica a seu critério hoje vou utilizar um gerador de funções aqui pra mudar a freqüência verificarmos o ajuste velocidade também venha comigo é está a galera etapa de potência montada os nossos transistores chip 41 aqui com os respectivos componentes os resistores de poder polarização de base e outro de proteção o nosso motor de passo aqui girando eu estou aplicando uma freqüência de 112 retas agora pra você ver dirá está no sentido anti horário agora se eu mudar a chave conseguiram ver a inversão aqui observem bem está no sentido horário certo invertendo a chave aí
a anti-horário beleza e aí a freqüência que você aplicar aqui na entrada de clock é a velocidade do motor então vou baixar a freqüência aqui no gerador observe aliás estou subindo aqui vamos baixar agora observa em que vamos reduzir a velocidade do motor agora estou em 70 hears 5030 ele vai gerando cada vez mais devagar mas ele não perde o torque observe estou forçando aqui com a mão e ele continua gerando então show de bola aprovadíssimo aí o nosso gerador de clock está funcionando e controlando a velocidade e o controlador o motor o contador símbolo
também está aprovado como vimos pela lógica dos leds e agora etapa de potência validada é importante observar o seguinte se você vai utilizar com uma carga relativamente forte aqui no eixo vai forçar muito o eixo do motor coloque dissipadores de calor aqui nos chips 41 que eles podem esquentar se for muito se forçar muito o motor certo então está aí não quiseram mundo este beach aqui outro detalhe que eu não mencionei que você pode controlar com um circuito lógico estou utilizando uma chave e para trocar o estado de destino mas você pode aplicar nível lógico
que 01 e consequentemente mudar aí a direcção do seu motor de paz com um único bit perfeito show de bola funcionando mais um projeto na nossa belíssima vídeo aula de engenharia eletrônica essa foi mais uma vídeo aula de sexta vídeo aula de engenharia eletrônica deixa ele lá é kim clique gostei que nos ajuda pra caramba compartilhe esse vídeo com todos seus amigos com toda a galera que também está nos ajudando bastante se inscreva no canal se novo por aqui clique aqui embaixo inscrever-se para acompanhar todos os nossos vídeos aqui tem vídeo diário projetos cursos tutoriais
porque isso engenharia uso intencional da ciência obrigado a assistir como sempre nos siga em todas as redes sociais um ótimo final de semana todos aquele abraço e até a próxima