Sim eu sou o professor bairros e no tutorial de hoje nós vamos ver você seja deve ter se perguntado Qual a diferença entre o servo motor e o motor de pass Qual o melhor como escolher é isso que eu vou falar nesse tutorial tudo de forma simples rápida LP de rasteira vamos lá um servo motor é um motor especialmente desenhado para aplicações em Sistemas de controle com movimentos precisos como controle de velocidade arranque agem posicionamento e tudo mais com sistema de controle necessita um detalhe importante é que nesse tutorial eu vou falar dos servos motores
que são usados na indústria como em máquina de CNC robótica Industrial etc existe um servo motor para aplicações mais simples com Arduíno podem ser chamados de micromotores ou servomotor para robótica não é sobre esse tipo de motor que eu vou falar hoje mas sim os grandes servomotores usados na indústria Então vamos começar a Comparar as diversas características de cada um mas para simplificar eu vou chamar somente de servomotor o servomotor que não é do tipo motor de passo porque também existem servomotores de corrente contínua e outros modelos mas o mais usado hoje em dia é
o servomotor ac síncrono servomotores T um torque constante em sua faixa total utilizável de velocidade essa é uma característica importante desse tipo de motor nos sistemas de controle você quer que o motor mantenha puxando a esteira com a mes da velocidade quando ela está vazia ou cheia veja na figura as curvas de torque por velocidade para três modelos da linha SW Veja a linha mais de cima o torque com motor parado 2,6 NM e o torque a plena velocidade 3.000 RPM não é pouca coisa é de 2,4 NM uma variação muito pequena Esse motor pode
arrastar a carga a qualquer velocidade já o motor de passe é bem diferente ele apresenta um alto torque em baixas velocidades mas conforme velocidade vai aumentando o torque diminui violentamente se a esteira começar a encher ela vai andar mais devagar se for acionada por um motor de Passo veja o gráfico da figura de um motor Nema 23 o gráfico é uma gangorra os engenheiros e técnicos devem observar as curvas de torque de cada motor para selecionar o tamanho adequado para uma aplicação os servomotores são mais rápidos do que o motor de Passo não importa o
torque exigido mas tanto os servos motores como os motores de Passo podem ser montados com uma caixa de redução com isso o motor vai precisar de menos velocidade para alcançar o mesmo torque com caixa de redução o torque aumenta mas a custo da redução da velocidade na ponta da Caixa ao escolher o motor Você deve sempre deixar bem claro se quer o motor com caixa de redução ou não se você da emfase a velocidade então escolha sem caixa se você quiser dar ênfase ao torque então escolha com caixa de redução Essa é a escolha normal
na fura você pode ver uma caixa de redução planetária muito comum nos motores de passo os motores de Passo geralmente são de malha aberta como o passo do motor de passe é muito preciso em condições normais o driver de controle do motor mantém tudo em ordem É só uma questão de contar os passos paraa frente e para trás a posição é determinada pelo número de Passos ou pulsos dados ao motor para que ele gire o número total de Passos é igual à quantidade de rotação ou rotações do o eixo do motor se um pulso for
perdido ou o motor não pudesse mover após o pulso por exemplo porque não tem potência para girar o eixo um erro de posição É introduzido mas o driver de controle do motor de Passo não fica sabendo disso e isso pode ser um problema em algumas aplicações se isso acontecer a máquina tem que parar e uma rotina deverá ser acionada para levar o sistema para posição inicial chamada de home na automação se a aplicação é então é possível comprar um motor de passo com um Encoder montado claro que o custo aumenta inclusive porque o driver de
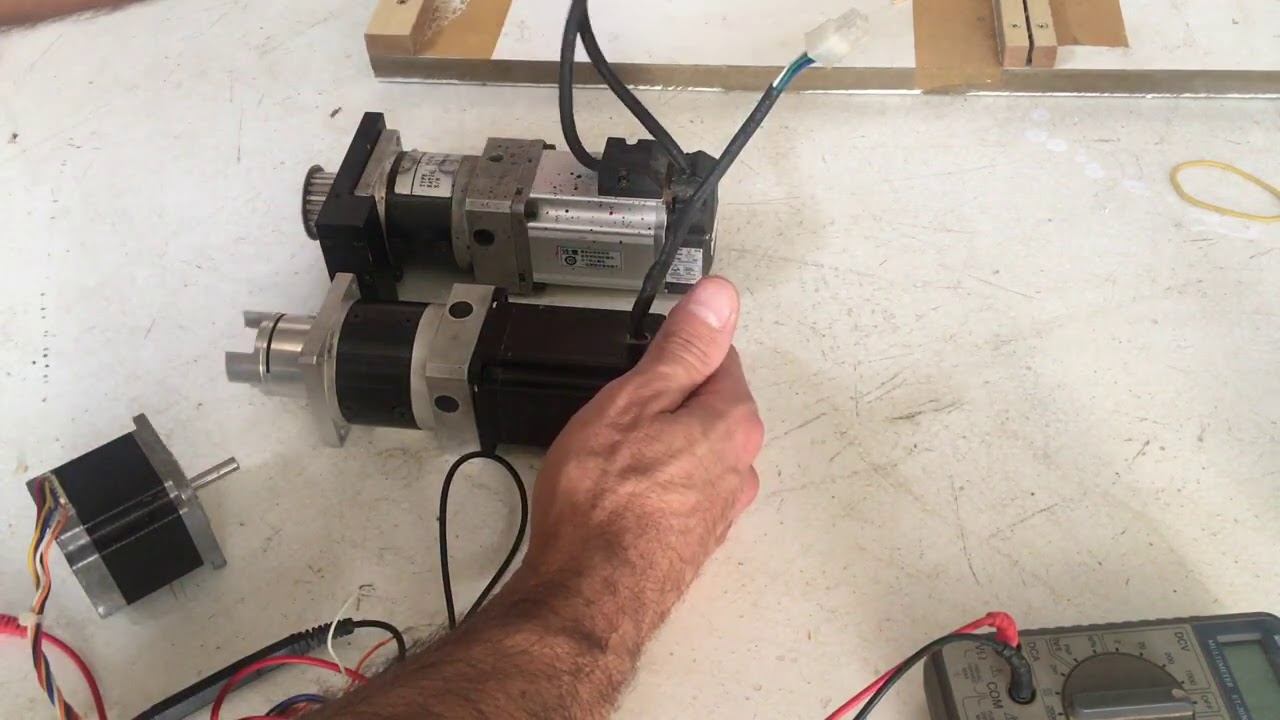
controle do motor tem que ser mais sofisticado na imagem você pode ver o motor de passo com Encoder e o seu driver Esse é um modelo bem Popular o e o Encoder é encaixado na traseira do motor de pass e manda pulsos indicando a posição exata do eixo do motor com isso o controle consegue monitorar com precisão a posição do sistema inclusive se o motor não andou e se andou para trás etc tudo fica mais seguro os servomotores por outro lado trabalham direto em malha fechada eles sempre vem com um Encoder usar o Encoder permite
que o controle monitore constantemente a posição do sistema verificando ao vivo e a cores a velocidade em relação ao que o motor foi instruído a fazer se a posição ficar para trás o controle pode aumentar os parâmetros para alcançá-la como tal o motor está sempre sobre controle se o motor não obedeceu o controlador fica sabendo e poderá gerar um sinal de erro para tornar o problema conhecido veja na imagem o exemplo de um diagrama da instalação de um servo motor com Encoder Essa é a imagem do motor da Veg da linha s e seu driver
uma obra de arte da engenharia elétrica note na traseira do motor os conectores para a ligação da potência e dos sinais de comando e Encoder atuadores geralmente precisam manter a posição em velocidade Zero Isso é ficar parados frenados como isso é feito por servomotores e motores de Passo difere e precisa ser considerado nos projetos o motor de passo como observado acima tem potência máxima em velocidade zero ele manterá essa posição com torque total até que outro pulso seja recebido dizendo para onde ele deve se mover normalmente ele está ligado em malha aberta como vimos antes
um circuito aberto sem realimentação contanto que o torque de retenção seja suficiente o motor de Passo se manterá parado ele é muito bom em fazer isso mas se essa condição for corriqueira é bom dimensionar o motor para 50% a mais de torque do que o necessário o motor de Passo parado prende bem o eixo como um solenoide prende o núcleo mas vai gastar muita energia para fazer isso ele vai esquentar se for dimensionado corretamente Não teremos problemas e a escolha do motor de passo nesse tipo de aplicação é uma excelente escolha e é uma solução
Bem Econômica comparando com o servo motor mas se mesmo assim o torque do motor de Passo for baixo para segurar as pontas existem motores de passo com freio como da figura aquela peça na traseira do motor de passo é o Freio normalmente alimentado com corrente contínua aí nada mais vai despencar um servomotor não usa o mesmo procedimento em vez disso ele monitora Encoder para permanecer em uma posição de velocidade zero o controle do Serv motor vai se encarregar de manter o motor na posição como o motor fica avançando e retornando para a posição essa programação
da parada deve ser feita com cuidado e esse movimento deve ser planejado em aplicações críticas especificando uma resolução do motor Acima das necessidades da aplicação sem parada tudo para que a busca da posição ou oscilação não afete o sistema os servomotores geralmente podem gerar até três vezes seu torque constante por um curto período isso lhes dá a energia de reserva necessária para compensar as mudanças de carga sem serem muito superdimensionados o controle do servo motor monitora a posição do Encoder e pode aumentar a velocidade ou a corrente para voltar à posição quando vê uma diferença
outro detalhe é que o comando do servvo motor tem um conector para ligar uma resistência de frenagem que poderá ser acionada durante a parada e com isso a frenagem se dá de forma mais rápida e o servo motor vai manter a parada de forma mais eficaz isso porque toda vez que ele tentar se mover ele vai se comportar como um gerador Em Curto Circuito curto controlado pela resistência de frenagem como essa da figura ambos os motores são geralmente precisos e repetíveis o suficiente para a maioria das aplicações industriais de movimento linear principalmente se estiverem usando
caixa de redução Principalmente as caixas de engrenagem planetárias lembre-se essas aplicações de atuadores normalmente usam acionamento controlados por Encoder se for usado caixa de redução a resolução do Encoder aumenta para aplicação industrial de modo geral Isso é muito bom mesmo se você estiver usando o motor de Passo então o normal é ver nesse tipo de aplicação motor de passo com caixa de redução aumenta o torque e a confiabilidade aqui estão algumas dicas para escolher entre motor de passo e servomotores se for necessário baixo custo o motor de passo é uma boa escolha se as cargas
forem imprevisíveis e criarem requisitos de torque que extras um servo motor é uma boa escolha se for necessária confiabilidade completa mesmo com perda de potência um servo motor deverá ser escolhido se for uma aplicação de baixa velocidade ou baixo torque o motor de Passo deve ser usado os engenheiros podem precisar analisar as características específicas dos motores e analisar os pró e contas de cada uma das aplicações e que estão trabalhando mas se não ficar claro sobre o tipo de motor isso porque a aplicação necessita recursos de motores de passo e serva motores Talvez um motor
de passo com controle de serva motor usando Encoder fre e tudo mais seja uma boa opção e fique atenta à tecnologia ela está evoluindo Você já ouviu falar no servo step você viu nesse tutorial algumas dicas que vão ajudar a escolher entre um servo motor e um motor de pass Mas se tiver tempo para a escolha Espere até conhecer o servo step num próximo tutorial é claro e bom proveito e por favor se você não é inscrito se inscreva e marque o Sininho para receber as notificações do canal e não esqueça de deixar aquele like
e compartilhar para dar uma força ao canal do Professor bairro e não tem site Tem sim é www.bos ped.com lá você encontra o pdf tutoriais sobre esse e outros assuntos da eletrônica e fique atenta ao canal do professor bairros para mais Tut tutor sobre eletrônica até lá