There are so many features of smartphones that we use without ever realizing how important they are. Take for example, the way we watch videos while watching videos on a smartphone we usually tend to hold it laterally in order to get the most out of the screen size. Magically enough the video playing on the screen and all the other menu options also orient themselves according to the new direction.
How does it know which way is down? Also, while playing games we use a feature called gyro. So when you tilt your smartphone it responses to your tilt.
How does it know the direction and amount of tilt? And the compass that we use to get the directions on the map. How does it know where is the north?
How does your smartphone know about its orientation? Today in this video we are going to explore these features of our smartphones. Smartphones and other mobile technology identify their orientation through the use of several sensors.
One of which is an accelerometer. It a small device made up of axis based motion sensing. An accelerometer is an electromechanical or mems device used to measure the direction of acceleration forces.
Such forces may be static like the continuous force of gravity, or as is the case with many mobile devices dynamic to sense movement or vibrations. The accelerometers detect acceleration over the x, y, and z axis. Now if you move it in any direction it will detect changes on the axis.
So when the phone is at rest or moving at a constant speed the accelerometer's data is not zero it's equal to the gravitational acceleration. The accelerometer's output is only zero in free fall. In any other situation the output of the accelerometer is the gravity vector plus the acceleration vector.
So when the phone measures the acceleration in a particular direction and it's nearby to the acceleration due to gravity, then the phone knows which way is down and thus reorients itself. But how an accelerometer works? It works on the principle of inertia, that is, it is the tendency of the body to resist change in its state of rest or motion.
In this arrangement a mass is suspended by the string. Now if we place two sensors that detect the distance to the mass, we can now detect the deflections of mass as the frame moves. But this is pretty big for your phones so we shrink it down to the micro scale to make this tiny device called an accelerometer.
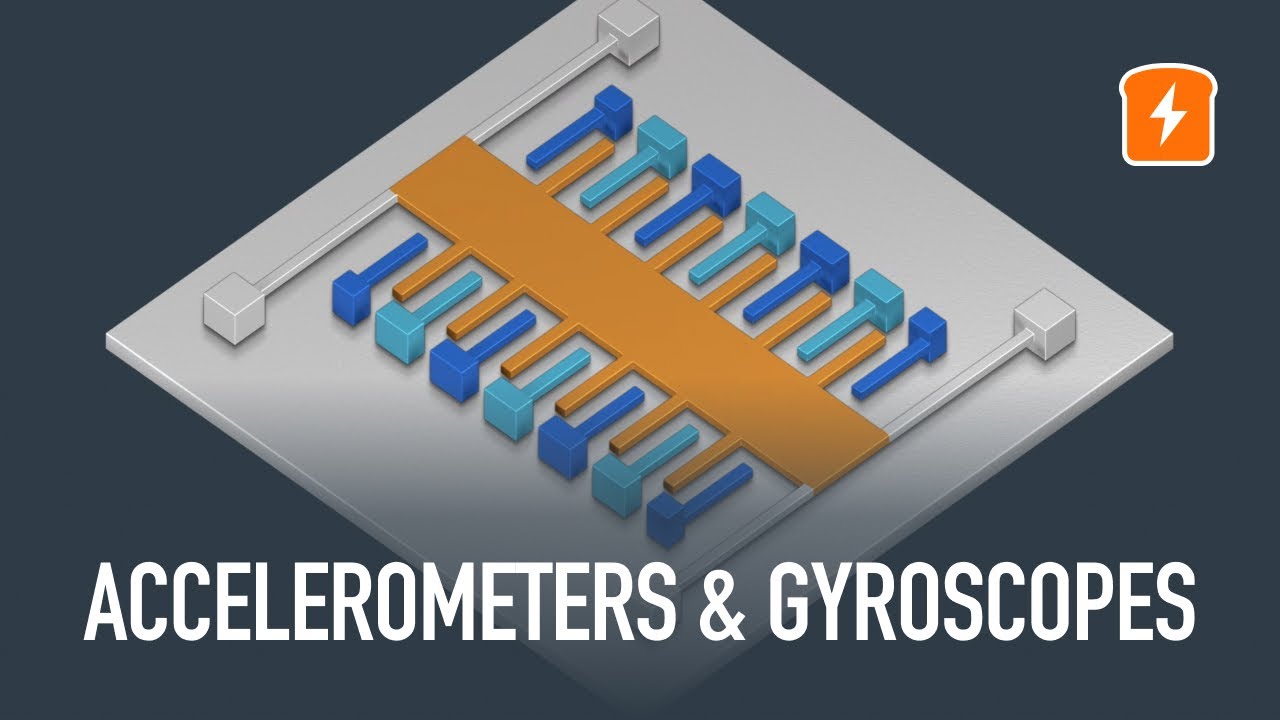
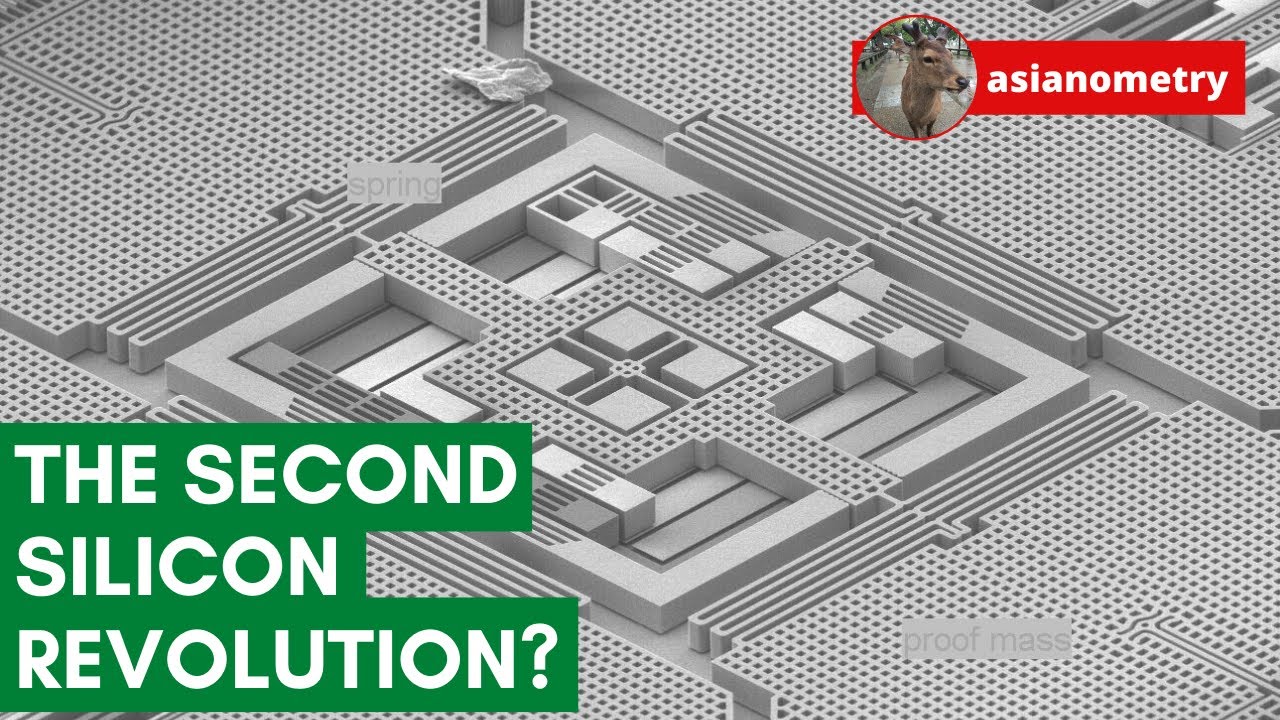
Inside this is the sensing device and a signal processing circuit to convert the sensor data to acceleration(Voltage). This is the microstructure of the sensor. It is composed of a capacitive finger structure.
It's arrangement is the same as this frame arrangement. This is the frame and this is the mass also called proof mass. In this arrangement the mass is suspended with these microscopic springs Now when the phone moves the frame moves with it but the mass stays in place due to its inertia.
This deforms the structure and alters the capacitance. The sensing is done by a change in capacitance. The displacement is tiny so thus the differential capacitance.
Hence, the circuit amplifies and converts it to a range of 0 to 5 volts. This accelerometer can detect motion in any two axes. Acceleration in the perpendicular direction is measured by the electrodes on the frame sensing structure.
This accelerometer can be modified to sense motion in all three axes. In this configuration, the proof mass is suspended in the center of the frame with the help of microscopic springs. Acceleration in the XY plane is sensed by capacitive fingers fixed on the frame of each respective axis.
Both sensing structures also contain electrodes that can sense vertical travel of the proof mass forming the simultaneous action of the z-axis accelerometer. Now we can sense which way is down precisely. So could we use the accelerometer to detect the phone's rotation?
Well, no. Once you start actually moving the phone it becomes impossible to tell which acceleration is true acceleration and which is the gravitational acceleration. The accelerometer will actually detect the perceived gravity not the actual gravity or acceleration.
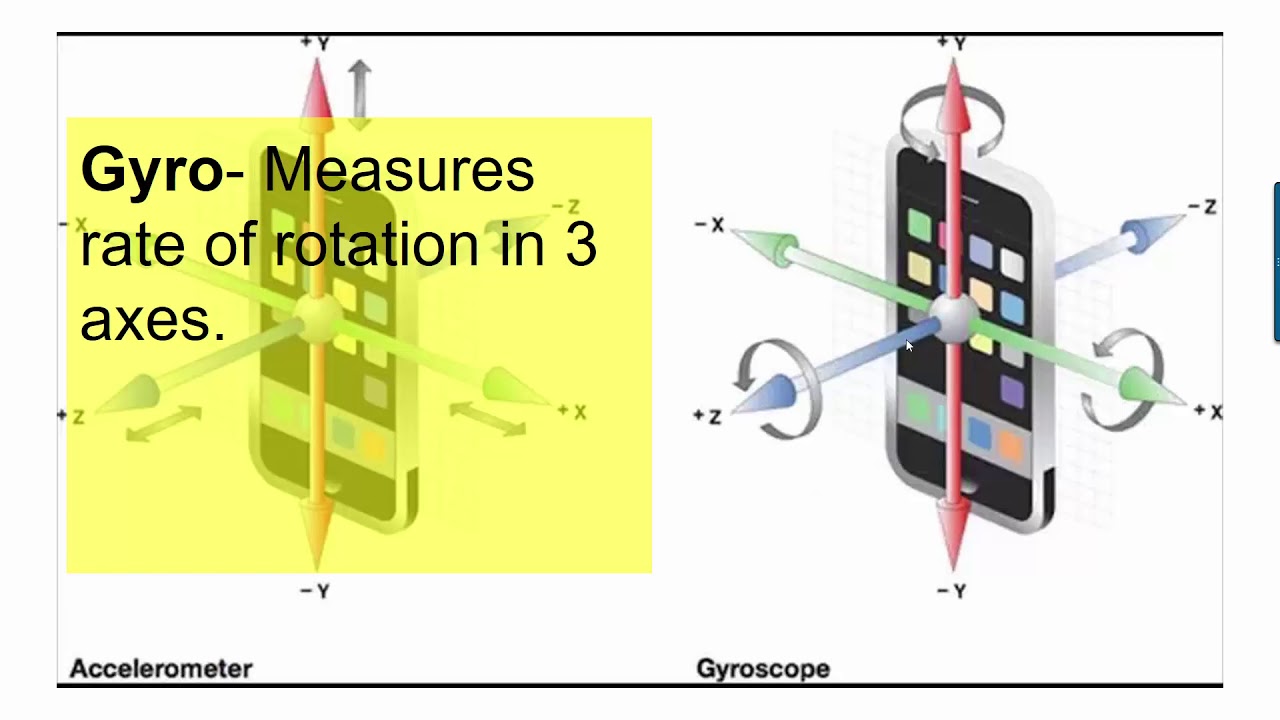
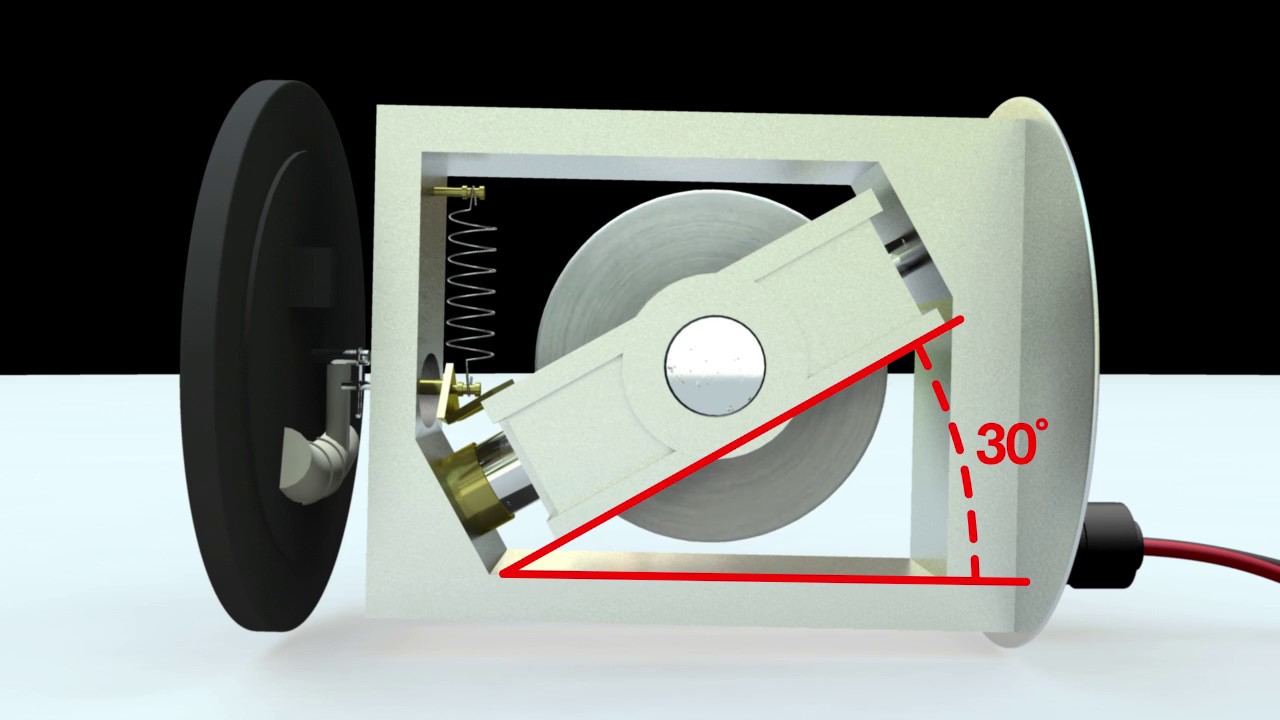
Hence, we introduce you to another sensor called the gyro sensor or gyroscope. A gyroscope is used to measure the angular rate using the Coriolis effect. It states that when a mass is moving in a particular direction then a perpendicular angular force applied to a moving mass creates a force perpendicular to both.
If we detect the acceleration of this force we can calculate the value of rotation. And to detect acceleration we use as an accelerometer. Gyroscopes are made by suspending an accelerometer on a platform.
The platform is oscillated with the help of solenoids. So when the frame is rotated, due to the Coriolis effect the proof mass in the accelerometer deflects. This deflection is measured and processed by the circuitry then converted to zero to five volts signal.
This accelerometer can detect acceleration in two directions and so thus the gyroscope. Both the rotations are perpendicular to the linear motion of the accelerometer. Rotations in the axis parallel to the motion axis will not show the Coriolis effect.
To scale this to the third direction we oscillate a three axis accelerometer in two directions or in a plane. It's microstructure looks like this. This can detect rotations in all three directions.
So using the gyroscope the phone can detect how much it has rotated over which axis and process that. But, the gyroscope is not affected by gravity it has to reference its position on itself. The current rotation is based on the previous rotation added with the detected change in rotation, over time errors will add up.
Hence, drift will occur. The gyroscope itself is not enough to calculate the through rotation of the phone. Due to these uncertainties of accelerometer and gyroscopes they apply a principle called sensor fusion, in which they combine data of different sensors to achieve a much more certain outcome.
We know that when in motion the accelerometer will actually detect the perceived gravity not the actual gravity or acceleration. By using the rotational information from the gyroscope we can estimate what the actual gravity vector should be. Also, we can subtract it from the perceived gravity vector to calculate the true acceleration.
Similarly, the accelerometer can be used to recalibrate the reference frame of the gyroscope and get a more correct and consistent rotation. Whenever the device is at rest the output of the accelerometer equals the gravity vector and drift can be periodically corrected by using the gravity vector from the accelerometer. With these two sensors we use one more for the orientation of the phone.
It is called a magnetometer. The magnetometer is used to define the rotation of the phone in the magnetic field. So it's basically a compass.
To define in which direction you are moving relative to the ground you'll need the magnetometer. It works based on the hall effect. It states that, when a current carrying conductive plate is placed perpendicular to the magnetic field a potential difference is produced perpendicular to both.
This is measured and processed to get the values of magnetic fields. Its microstructure looks like this. For using this sensor in three directions we have to use three different sensors all perpendicular to each other.
Now with the value of the magnetometer we detect the direction of the north. Combining the magnetosphere data with the gravity and true acceleration vectors you'll get the full orientation information. Each sensor has its own advantages and disadvantages.
For example, the magnetometer practically doesn't build up errors over time but is very slow at detecting movements, a gyroscope on the other hand immediately detects movement but will become inaccurate over time as it starts to drift due to error accumulation, and the accelerometer will precisely detect the acceleration but lacks the ability to distinguish it with the gravitational acceleration. These three sensors are constantly completing and correcting each other and can only provide sensible data together. With the help of these sensors the phone will get its orientation in space.
Now you know how the phone knows about its orientation, but these sensors need electricity to sense and work. Watch this video to look in the working of a mobile charger. Thank you for watching.