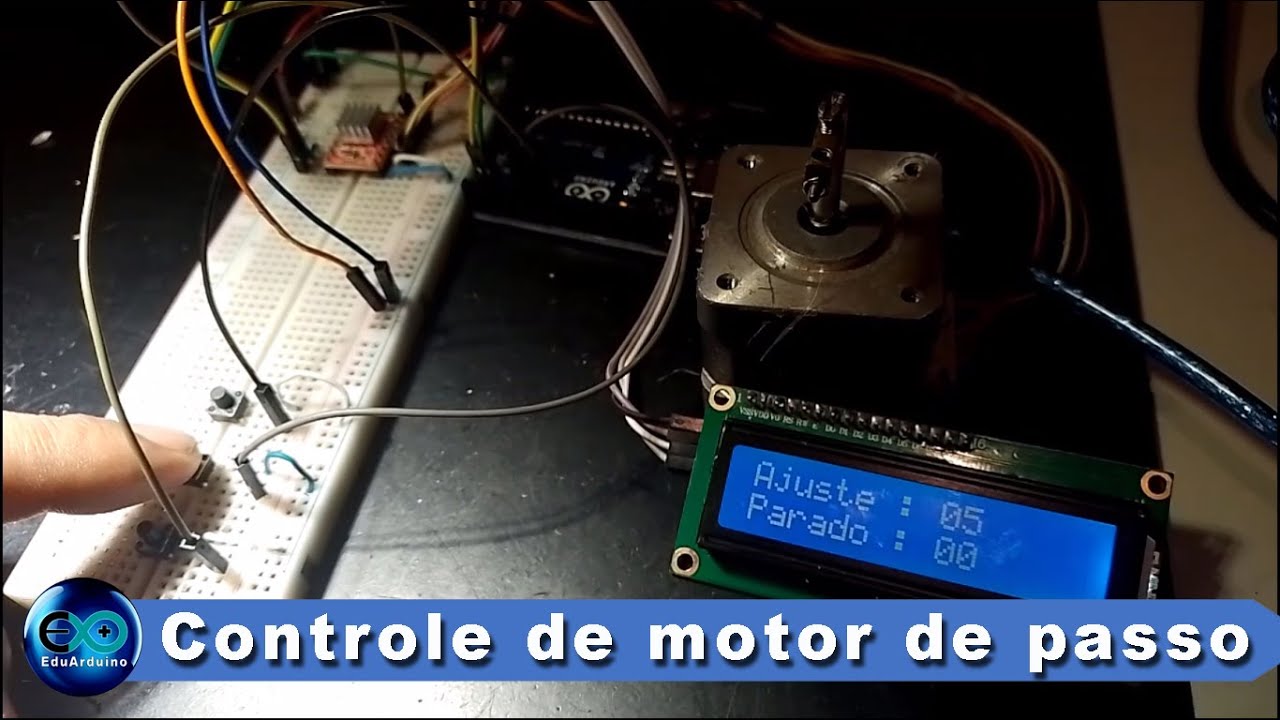
fala galera beleza aqui é o wagner ramos do wr kit xenon e este é mais um vídeo de engenharia eletrônica nossa clássica vídeo aula de sexta no vídeo de hoje um tema muito solicitado pelos assinantes que é como controlar um motor de paço utilizando o que o microcontrolador pique hoje vamos demonstrar um controle de motor de paz com o microcontrolador pitt está demais que gosta desse tipo de conteúdo desses eu li que você vai aprender bastante na aula de hoje então já neste leque este vídeo é um oferecimento da torá e do brasil precisa de
um transformador olsdal indutor sob medida para o seu projecto tolói de ponto com ponto br o primeiro link da descrição faça já a cotação para transformadores indutores tornou ideais muito mais eficientes que os convencionais então vale a pena vamos para o vídeo de hoje e já deixa que ele lembrando me sim em todas as redes sociais estão prontos para mais uma classe que é de sexta caprichada landis guetta saredi eu sempre digo que é uma grande honra gravar as clássicas de sexta pois ela reúne os conteúdos vistos nos cursos e séries do wr que este
ano nos amplos recursos que temos disponíveis no youtube e hoje vamos ter bastante conhecimento em eletrônica analógica parte de driver então um pouco de potência vamos entrar em programação sinais programação de pique e assembléia para a pique muita coisa mesmo na aula de hoje você vai aprender bastante e eu peço que você contempla os cursos exclusivos na hotmart links todos na descrição estou com datasheet aqui no motor de passo que vamos utilizar no controle quer aprender a interpretar datasheets a ler tem curso pra isso e é o nosso mais recente curso glt spice básico então
adquirir os cursos wr kits que muitos têm certificado acesso vitalício e tudo mais você nos estimula a criar novos cursos no futuro para você estudar cada vez mais e ter cada vez mais conteúdo disponível para você então vai e nos ajude também adquirindo os cursos e invista no seu conhecimento eu estou aqui com data xixi o que nos interessa nesse datasheet basicamente é o diagrama lógico vou utilizar um motor que é o motor unipolar o motor 1 unipolar de paço unipolar tenho seis filhos estão aqui estão os dois em rolamentos dele no caso aqui tem
um comum que é que o vermelho e akiva alimentação nessa alimentação de 12 volts para o meu modelo de motor aqui nós temos um preto marrom laranja eo amarelo aqui que tem esta tabela verdade aqui são quatro fios portanto quatro vintes de controle para mover o motor no sentido horário é essa seqüência de passos 1 2 3 e 4 no anti horário é 4 3 2 1 olha só aqui ele mostra um sinal de menos no caso eu preciso aplicar um sinal de menos que seria um pulso inverso aqui seria 10 volts o espaço vazio
significa 12 volts ok então no instante em que o preto tem zero volte o marrom ontem 12 volts laranja tem 12 volts e amarelo tem 110 volts é o teco quanto passo 1 e assim por diante no caso como pretendemos utilizar um driver pode ser um driver com transistores npn eu vou utilizar o conhecido o ln 2004 que é basicamente o mesmo o ln 2003 que é bem popular você aplica um sinal por exemplo o nível logico de 5 volts em uma das entradas e ele gera na saída um sinal invertido quando eu aplico 0
na entrada ele gera na saída atenção de alimentação estou aplicando no ueli e vamos ver melhor isso depois no hardware portanto é preciso considerar essa tabela é inversa para o meu projeto de controlador e é o que pretendemos aqui portanto eu vou pegar aqui um bloco de notas para facilitar e olha só é bem simples onde tem traço virar onde tem espaço vazio vir a 0 então tá aí o primeiro passo segundo passo terceiro passo a linha 01 014 passa 010 apenas inverte a lógica então esta é a seqüência que precisamos gerar eu vou utilizar
o microcontrolador pixon12 fmi e 29 mil rand oito pinos baratos fácil de encontrar e eu posso até utilizar os quatro bits aqui então gerar esta sequência no pique só que eu vou fazer diferente como eu quero o controle mais amplo ou seja ter mais opções pra dois futuros eu vou utilizar apenas dois bits e controle saindo do pique e com isso eu consigo fazer dois pinos sobrarem eu posso utilizar como entrada como saída para alguma outra aplicação e digamos que no futuro era controlar um segundo motor de passo com o mesmo pique também é possível
deixar sobrar dois filhos mas como vou deixar sobrar dois filhos eu preciso de quatro aqui se você olhar com atenção esse tipo de vista vamos dizer assim clínica observador a você deve ter onde está projetando a coluna vizinho aqui é sempre o inverso da sua esquerda nesse caso aqui eu vou dar nome aos bits vamos chamar aqui de 32 o eser então o 2 é sempre o inverso do 3 observe que quando 3 a 1 20 quando o 302 é um mesmo ocorre aqui ó quando 100 é um quando é 11 00 então mesmo o
inverso eu vou projetar para o beach mais significativo e para o menos significativa ou gerar esses dois sinais com pique então eu abstrai as duas colunas no meio aqui e agora o que tenho esta nova tabela verdade aí então essa seqüência que eu preciso é preciso gerar um contador síncrono no caso aqui sobrou então a saída 3 a 0 perfeito e depois eu vou aplicar estes sinais em circuitos inversores meus senhores digitais que vão gerar as colunas 2 e 1 ao natural é a sacada então eu tenho esse computador símbolo bem mais simples eu posso
fazer isso com circuitos discretos também já fizemos aqui no canal na realidade a gente e wr kits motor de passo na busca do youtube mesmo vai encontrar diversos vídeos só que ainda não havíamos feito com o microcontrolador pique então temos mais opções para controle de motores de passo e é o que vamos ver estamos vendo na hora de hoje muito bem então tenho aqui esta seqüência que eu preciso gerar o 1 1 0 0 1 0 0 1 e pra ele tirar no sentido oposto tem que ser 0 1 0 0 1 0 1 e
volta para 101 e assim por diante muito bem vamos continuar aqui em resumo o nosso circuito é esse aí ó esse é o circuito de controle que vamos precisar então o nosso controlador eu quero que aplicando um sinal de clock de acordo com a freqüência de sinal de clock o controle a velocidade do motor e de acordo com a presença ou ausência do sinal de clock ou ligue ou desligue respectivamente o motor então esta é outra questão para gerar os passos eu preciso de circuito cinco anos é preciso de um clock então esse clock pode
ser gerado ou por um ou por um outro processador ou por um circuito mais simples que é o caso que eu vou aplicar hoje mas durante uma vídeo aula vou dar outras dicas de aplicação para você então aplicou um sinal de clock de acordo com a freqüência do sinal de colóquio ajusta a velocidade o motor é bem simples não precisa de uma doação pwm por exemplo para ligar e desligar o motor é simplesmente ou enviar pulsos ou não não posso enviar ou low um reino neste plano de controle eu vou manter desligado o motor novamente
existindo sinal de clock o motor gira e mais um bit de direção que está em si está em um nível alto ele gira num sentido se está em um nível baixo e dirigir em outro aí os meus quatro bits aqui que geram esta seqüência aqui que na realidade aqui são dois bits mais com circuitos inversores simples eu adiciono os beats centrais facilmente o aplique um driver eu vou utilizar um l e 2004 na prática este driver vai gerar os sinais aqui que vão ser aplicados no motor então aqui nas saídas eu desliguei me ó motor
3 ac barra moto3 que é o inverso como vimos o no2 é o complemento do 3 e 1 a complemento do zero e um está em quadratura em relação ao outro para obter o a sequência que o perfeito na tabela no caso aqui nós estamos enviando 1 0 1 0 1 0 0 1 0 1 0 1 0 0 1 0 1 0 1 0 1 0 e assim por diante aqui está o software completo software ficou bem elegante e o software é na linguagem assembly pra pique isso mesmo hoje estamos escovando bits aqui com
você é legal que o drm pela abiec o compilador mp assim é gratuito você pode dar um google em baixar e instalar já demos esta dica no curso de assembléia para a pique wr kits busca no youtube wr kits assembléia e pique tema político 80 vídeo-aulas se não me falha a memória do nosso curso pra você estudar então basicamente código está todo comentário eu não vou explicar tão detalhadamente assim listagem do processador arquivo de inclusão e os filhos de bits estou utilizando o clock interno 4 mega hertz e os e e o master cleanse desabilitado
aqui eu defini mónicas para os bancos de memória em assembléia é preciso selecionar os bancos de memória aqui eu definir as entradas e saídas no caso tenho a saída 13 a saída 0 que estarão no g4 gp 5 do pib respectivamente e o control aqui é a minha entrada de controle que o gp3 o gp3 é o pino de master cleary mas como eu estou desabilitando nos fios e beats e utilizo ele como o pino digital comum de acordo com o sinal presente encontrou eu seleciono a direção do motor de paço registradores de uso geral
que associando a linguagem seriam variáveis do meu código apenas uma que se chama estepe para armazenar o passo atual do motor e outras duas que eu preciso aqui para o salvamento de contexto ao entrar e sair de interrupções e isso vimos detalhadamente lá no curso autor de 17 é origem no endereço 0 hexa desvio para o início tão lá no início está aqui esta lei bom eu configuro smile saídas gp4 gp 500 ef hexa no registrador aqui opção flex zero hexa porque desabilitados por outros internos e configura interrupção externa por borda de subida isso tudo
você vê no datasheet do pic quer aprender a ler da taxa de pitty uma aula dedicada lá no curso exclusivo hotmart pra você ficar fera também datasheets de microcontroladores eu vou utilizar a interrupção externa você já percebeu isso né de opção externa por borda de subida sempre que houver uma subida no meu sinal de clock eu chamo em o desvio o código para interrupção externa para o setor corrupção e aí eu determino qual passo eu dou para acionar o motor não é isso que estamos fazendo aqui a configuração inicial também voltando para o banco 0
e desabilita os compradores internos que eu vou trabalhar apenas com miles digitais e eu habilitou aqui colocando 90 hexa no registrador int com interrupção global interrupção externa isso tudo você vê lá no datasheet iniciam limpando as duas saídas com as instruções bits player fahel inicia o estepe meu registro de uso geral com 4 hexa o valor inicial aleatório mesmo perceber que aqui eu tenho um loop infinito gol tio dólar dólar significa o endereço atual da memória de programa vou te levar para então estou dizendo pra ir pro endereço atual da memória de programa que é
onde é que esta linha que eu estou aqui significa que eu fico preso e um loop infinito aqui aguardando ocorrer a interrupção então essa é a sacada nosso loop infinito é vazio agora voltando o promotor de interrupção que no endereço 4 hexa todas as interrupções dos pixies mid-range apontam para este vetor de interrupção perfeito eu salvo com o texto já expliquei detalhadamente no curso de ascender a pique e o teto da minha flag int efe se a fly está limpa não ocorreu uma interrupção então vou desviar dessa instrução aqui pois estou aplicando a instrução beach
teste fahel ski concluir um teste o bit deste registrador e desvia se for zero e sr ou seja a saída da interrupção que está aqui que eu faço na saída da interrupção a recuperar o contexto com este algoritmo aqui instrução gretchen fai o retorno da interrupção um volto para o processamento que é o mesmo que voltar aqui para o loop infinito se ocorreu a interrupção a nossa flag aqui vai estar in e ele não vai desviar ele vai processar esta linha que gol útil trata int e interrupção externa desvia para esta lei bom aqui neste
endereço relativo na memória do programa onde então o bit player fao limpo a flag como o fabricante e pede eu chamo uma subnotificação que eu chamei de processo em processo eu vou gerar o computador síncrono promotor de paço já vamos ver ela funcionando depois lá dentro do processo o encontro em teerã ou outras regiões também instrução muito ano ele volta aqui pra a próxima linha e sai da interrupção então em províncias que está aqui ó logo abaixo do loop infinito desenvolvimento da sua rotina para controle do motor eu rotacionando à direita um shift light no
registrador estepe e armazenar nele próprio por causa desse argumento aqui então aqui estou selecionando os passos que eu vou dar um novo conteúdo de estepe para o registrador de trabalho que o acumulador do pic faz uma operação em si com o registrador de trabalho e o conteúdo 0 ea literal melhor dizendo 01 hexa então eu comparo aqui se estou em um efeito é o paul este algoritmo está fazendo isso é uma comparação em assim então se houver uma coincidência o resultado armazenado em w não será zero pois eu faço o em bit a bit entre
o conteúdo de wl terá 101 nesse caso o conteúdo não sendo 0 obtida 0 o registrador status será zero então aqui o desvio se for zero se obtiveram 10 helmes viu portanto vou desviar da próxima instrução que o gol útil de decidir e direção esse nome eu determinei pra lei bom é no caso eu vou recarregar significa que eu já cheguei no 01 aqui então vou recarregar o valor 10 hexa em esté para recomeçar então este algoritmo que é necessário para fazer um chifre right então inicio com os desenhar a gente fica mais interessante aos
8 bits então em 610 hexa quando eu dou um shift light ou desloco o bit para a direita tá aqui ó o resultado é esse quando eu lhe encontrar a instrução de novo ele desloca mais uma vez se desloca mais uma vez que desloca mais uma vez quando chegou em um ele vai perceber que a verdadeira esta comparação aqui e vai recarregar 10 é que foi o que acabamos de ver em todas as outras situações que eu faço o em bit a bit eletrônica digital aí resulta em zero se resultou em zero o conteúdo de
w que o acumulador obtido 0 de status vai a um então eu não vou desviar pois estou testando aqui vitesse felsky clear disse josé se e zeziel é um ele processa a próxima linha vá para a direção que a minha lei bo onde eu vou testar control ou seja o pino de controle externo é a minha entrada externa se contra o forum agora beach teste fahel chipset o desvio se for zero e o processo essa linha gold to step tio que é outra lei bom então se for um ele desvia e processo steps one no
steps one é uma comparação como registro estepe então o conteúdo de estepe quando for 02 hexa processo passo 1 04 passo 208 passo 3 e 10 estudo em hexadecimal paz quatro gols útil aqui que estão aqui ó e esses passos galera são estes bits que você vê aqui ó passo 1 biscet fahel out 3d set fire 1.0 então com 1 este aqui passo 27 klier tão 1010 passo 3 clear clê 00 e passo 4 colher 701 thai perceba que se o nosso controle for zero ele vai processar a próxima linha vai desviar este algoritmo inteiro
aqui vai processar o estepe tio que alegou estar picchu aqui eu inverti só a sequência agora o passo 4 3 2 e 1 perceberam que foi feito então um vento sentido de rotação apenas com este beach aqui é assim galera e se faz o teste condicional em assim é bonito de ver isso não é vamos deixar as coisas mais lindas ainda vamos fazer o seguinte vamos fazer uma simulação aqui hoje a aula promete vamos lá mp lado simulator o assembléia lindo demais pois eu consigo processar linha ali eu tenho com o pilar de um novo
projeto bild steps aqui agora estou processando linha perfeito é preciso ver aqui em 2011 no caso o mote eu já adicionei aqui o estepe o jipe ou work certo jipe ou registrador das minhas miles as duas saídas no caso a gp 4gp 5 o estepe o registrador de controle então olha só carrega os registradores iniciais alistando steps até chegar aqui ó carreguei 4 no acumulado do ano registrou de trabalho carreira quatro no esté é muito literal worku mova mais literal para o registrador de trabalho qual literal 04 ex depois mova o conteúdo do registrador de
trabalho para o registrador ao registrador o estepe de fato ele recebeu quatro aqui ó só que eu coloquei em binário então agora vou dar shift light só que eu preciso forçar a interrupção aqui então vamos sim de burger estímulos newark book preciso aplicar um estilo então eu estimo vai ser o que no pino gp2 que é o da interrupção externa do pic a ação vai ser um pulso em ray de um ciclo mesmo é isso nos darão fai don pepe e ele desviou lá do vetor de interrupção o tac o processamento simulei uma borda de
subida no pino de interrupção externa estão avançando aqui affleck está acertada pois houve interrupção externa o gol que o trata intitulam vai desviar aqui do próximo chegou aqui na lei ou de tratar o olimpo affleck qual o processo eu vou chamar processo que assumiu o time então desvia lá pra baixo tá aí um processo de instrução no they didn't right fahel step salvem estepe do fmi o argumento o estacionou para direito beach viram como funciona agora o jogo isso no registro de trabalho foi eu faço em bit a bit o resultado deu 0 cedeu 0
flex e status está em um desvio aqui se for zero então não vou desviar ou o tio da action sair agora o testo control encontrou naturalmente está em zero não forcei nada então ele vai processar o steps to go to step to agora vou fazer as comparações pertinentes até encontrar a correlação no caso aqui já é o estepe 4 ó pois eu vou fazer em de bit a bit eu vou testar a flag z e vou processar o passo 4 foi lá que o passo 4 beach clearout 3 e 7 out 0 colocou um ali
na saída 0 e 0 na saída 38 anos retorna da sua rotina saia da interrupção volte o próximo rock voltou lá para interrupção no processo de novo vou rotacionar a direita de novo rotacional à direita eu faço aqueles testes pertinentes só que agora eu vou encontrar a correlação aqui ó então ele vai desviar o tio de ir vai carregar 10 é que sem estepe primeiro para o registrador de trabalho depois para o estepe carregou agora o testo fácil processamento de novo eu vou encontrar a igualdade lá o estepe e um olha só processei o estepe
eo que é colocar um fim nos dois bits de saída e assim por diante o próximo será o step 2 3 4 e segue nesta sequência e compreenderão galera então processamento é esse legal da semana que podemos fazer minha após linha isso é muito bacana bem lindo mesmo tá tudo para download na descrição clique mostrar mais você tem o software tem os arquivos de simulação você tem um espelho os pdfs que eu utilizei a simulação está aqui ó simulação fiz no proteus tem curso de proteus também aqui em baixo na descrição hotmart eu enviou um
sinal de clock pro meu pique 16f 629 e aqui está a sacada galera eu tenho as duas saídas que 10 aos 13 out 0 aplicada inversores o complemento de aos 13 o meu out dois complementos de alte 0 o meu altium não perceba que abre nessa chave não envia o sinal de clock simulando gráfico as saídas ficam zerados aqui só tem o sinal de clock e na primeira lhe enviando o clock aí eu tenho as minhas saídas certinho como esperado você pode fazer análises e aí e comparar com datasheet lá pra ver se está certinho
eu deixo como exercício pra você muda o ambiente de direção veja que houve aí a quadratura do sinal é você novamente pode ver se realmente inverteu a sequência dos beats e vai comprovar que funcionou ó 0o ó show e ainda tem aqui dando play osciloscópio virtual mostrando estes mesmos sinais para nós desliga o clock sinais morre negou clock voltam a funcionar e aqui ó ocorre a defasagem dos dois canais superiores aqui porque eu estou entregando para o canal 4 só por isso a eles que esse movimento mas isso está comprovado que vai funcionar o controle
e direção o circuito final está aqui diagramas esquemáticos final está aqui eu fiz galera pra gerar o clock eu utilizei 4093 como um simulador todo mundo já conhece o componente extra a topologia aqui meu sinal de clock esta porta lógica aqui nem de substituir ligada como inversora eu tenho amália aqui um resistor de um carro e um trem pote de 100k ajustando o tranporte e modificou a freqüência de oscilação e tem também o capacitor de um micro faro eu aplico um buffer aqui e esse buffer é controlado tem um pouco de 10 k para os
5 volts quando tem nível lógico alto porque está em ação existe oscilação aqui na linha de clock quando eu ligo essa chave aqui eu coloco louco aqui então vou matar o meu sinal não vai haver oscilação eu vou utilizar uma chave um pólo duas posições poderia ligar um lado em 5 volts aqui fazer a troca desta forma só que existe o tempo de transição mecânica mesmo de um contato para o outro então colocando um pouco ap ac desta forma como eu fiz eu garanto que este plano estará mantido sempre um nível lógico conhecido mesmo demorando
um pouco aí pra fazer o chaveamento só por isso mas esse beach aqui pode ser acionado por um processador externo seu processador principal por exemplo ea sacada que o 629 tenha todo o trabalho de gerar os sinais para controle do motor de passo o mesmo método foi utilizado aqui no gp3 que o meu mas tranquilo veja que o clock entra no gp2 que a interrupção externa mas tranquilo é o beach de direção então não tem um pouco aqui uma chave ou a terra ou não o sinal o envio 01 em 2011 através do pur duas
saídas aos 13 out 0 e as duas outras portas do 4093 que sobraram utilizei como os meus inversores e aí eu gero aut 2 e ao tio respectivamente aqui ela nos meus quatro sinais de controle estas lei bolson ligadas lá no l e 2004 aqui ó e aqui estão as quatro saídas que vão pro funcionamento do motor de paz unipolar tenho seis filhos sendo que os dois vermelhos centrais vão nos 12 volts junto com o 9 do ln 2004 o pino 8 do ele em 2004 deve ser aterrado no esquema tático não está mostrando isso
mas lembro dessa informação veja no da xi também para entender melhor mas o keno 8 é o terra no ele em 2004 lembre disso então até hip 18 e aqui os fios preto marrom laranja e amarelo do motor de passos aí todos os arquivos na descrição clique mostrar mais e façam download vamos pra prática agora vê tudo funcionando venha comigo [Música] está aqui um circuito montado com todos os sinais necessários para o controle do motor de paço observe que nós temos aqui o 4093 o oscilador dele com o capacitor de um micro receptor de um
caio e o transporte de 100k nós temos aqui o o nó da oscilação como demonstrei no diagrama esquemático com essa chave e um pólo duas posições estão utilizando um lado dela apenas associada ao púlpito de 10k o cérebro que é o pique 12f 629 você vê que é o centro e aqui o bicho de controle de direção também com a mesma sacada estamos utilizando um mundial aqui de 10k e uma chave aí um pólo duas posições face usando apenas um lado dela para aterrar o pino quando quisermos inverter o sentido os dois capacitores de campanha
de 100 anos estão aqui aqui está o ln 2004 que é o driver do motor de passo então ele recebe os 4 bits nos quatro planos iniciais aqui que você está lendo niro eleva a tensão aí é unido de 12 volts aqui está a fonte de 12 volts aqui está a fonte de 5 volts o terra é incomum e aqui é a saída ou melhor dizendo as saídas para os fios no motor de passo que estamos utilizando um modelo unipolar como vimos na parte teórica ou seja eu coloco a chave nesta posição aqui eu desligo
a oscilação coloco nessa posição eu lhe então quando a oscilação aqui está o sinal de clock entrando no pi eu faço o motor girar quando não há um motor fica parado é que é o sentido de rotação de acordo com o nível que entra que não tem 14 como configuramos lá no nosso software inicialmente vamos avaliar as duas saídas do pic então a partir da entrada de oscilação aqui eu tenho o osciloscópio tectônicas ligado aí o canal está no out 3d o canal 2 está no alto 0 é o beach mais significativo e menos significativo
estes dois estamos gerando no pique e invertendo aqui com 40 93 vamos analisar na tela do instrumento os beats funcionando conforme previsto você vê na tela do instrumento então não tem erro galera aqui o canal é a nossa aut 3 no canal 2 é out 0 sobre gana e pelo canal 1 você pode ver estão utilizando essa chave é que ajustando 30 pote já que eu consigo diminuir a freqüência também consigo aumentar a freqüência quanto maior a freqüência mais rápido o motor de paço vai girar diminuindo ea freqüência quanto menor é a freqüência mais devagar
motor de passo irá girar a freqüência mais baixa tirando a chave aqui uma chave que liga ou desliga oscilação veja aqui eu mato as minhas saídas brigando de novo tenho os mitos funcionando conforme previsto ea chave de direção se ouvir o outro lado você viu aí a mudança observe que eu estou brigando pelo canal 1 então meu canal 2 vai estar atrasado se eu mudar o bit agora está adiantado em relação ao canal 11 aliás está atrasado a galera desculpa era um shopping aqui o canal 2 só vem depois ele está atrasado em relação ao
canal miro a chave e agora ficar adiantado em relação ao canal veja aqui a borda de subida ocorre antes da borda de subida do canal 1 que é basicamente os dois sinais em quadratura que ao bem interessante modifico aí a fase do canal 2 você vê que está funcionando em ambos os sentidos conforme previsto o beach estando em 0 tenho a sequência 100 001 o 1o beach estão nenhum eu tenha freqüência inversa o 0 1 0 0 1 0 e assim por diante eu vou utilizar este motor de paz unipolar da nbb que é o
da china que vimos e aí eu vou ligar aqui na saída corretamente os fios preto marrom laranja e amarelo os fios vermelhos vão tratar 12 volts motor já está ligado eu vou acionar a fonte em branco a fonte fornece 12 volts aqui pro eliene e também promotor e 5 volts para os circuitos lógicos e o terra em comum liberei a saída da fonte veja que temos um motor girando ó olha só consegue ver que ele está girando no sentido anti horário observe com atenção bacana né o torque do motor é bem bom observa que eu
tentei forçar aqui a parada dele e não consigo diminuindo a velocidade aqui que a diminuição de freqüência de clock ó é que a velocidade mínima obtida agora ficou mais perceptível ainda olha o torque do motor e outra grande vantagem de motores de fácil eles são silenciosos em silenciosos mesmo sair aqui eu desligo ou ligou novamente o motor posso aumentar a velocidade aqui no transporte e aqui o bit que eu invento sentido está no sentido anti horário vou diminuir a velocidade para ficar bem perceptível sentido anti-horário agora sentido horário acabou de inverter a novamente o torque
está muito bom eu tenho trabalho aqui com a chave não é bom se excelente isso está a velocidade máxima do motor bem bacana eo toque na máxima também é muito bom e consegui ver terá o sentido de rotação aqui ou desligar a qualquer momento o motor ou inverter o sentido de rotação com o motor desligado depois ligar novamente funciona que todas as formas lembrando a você que estas chaves aqui podem facilmente ser substituídas por circuitos lógicos ou até mesmo por um outro microcontrolador digamos que você tenha um micro controlo um microcontrolador maior tipo pick 16f
87 ao 18f 45 50 ou mesmo outro aí um atr42 e tem dois circuitos aqui dois pares 12f 629 e o eliene 2004 aliás se você utilizar um l e 28 04 você precisa de um único para o acionamento pois ele vai ter um pino suficiente vai ter drive o suficiente para dois motores até 2 motores então o processamento dos sinais fica a cargo dos 12 f 629 promotor de passo só que você tem que alterar o código apenas gerar os 4 bits como mencionei na parte teórica ou se quiser continuar incluindo 40 93 como
inversores pode continuar só que aí o seu processador principal vai gerar o clock a parada do clock seria essa chave aqui só que daí o próprio processador envia ou não o sinal de clock é o equivalente ao desligar aqui na chave e o bit de direção dos motores de passo do circuito ficou excelente para você aplicar lhe um processador mais poderoso o processamento do motor fica a cargo do meia 29 como vimos aqui hoje só envia sinais de clock parada e direção para os motores de passo que você quiser se você controlar dois motores de
passo você pode facilmente controlar um robô móvel e autónomo por exemplo então eu estou dando diversas dicas para você aprofundar nesta aplicação aqui que estamos demonstrando na clássica de sexta agora você deve ter notado que colocamos aqui os quatro canais osciloscópio agilent aqui na saída do ln em 2004 vamos ver as formas de onda que estão sendo enviadas diretamente para os fios do motor de paço com ele em funcionamento vai ser bem interessante aí estão as quatro saídas existe um ruído presente pois lembrando que o motor uma carga emotiva eu estou acionando diretamente ele a
partir desses sinais aqui tô com dez vôos por resolução vertical em cada um dos quatro canais aqui do agile nós temos aproximadamente 12 volts de amplitude em cada um dos sinais então aqui a nossa saída mais significativa out 3 out 2009 a mais é que o complemento de alte três aqui a altium é que a 10 branca ao tio nada mais é que o complemento da haute 0 e viramos no pique aut 3 e out 0 com os inversores do 4093 geramos os outros sinais necessários se inverter a direção você nota a defasagem dos canais
de baixo o inverter novamente ó aí variando a freqüência diminui bastante aqui ó seria a freqüência mínima possível possível e aumentando a freqüência você vê os sinais estamos demonstrando perfeito galera o consumo dos circuitos lógicos ficou e relevante praticamente uns 3 milhão peles como você vê aqui o 12 volts aqui prodrive promotor de passo para esse modelo de motor 117 mil ampéres sem uma carga no eixo forçando um pouco eixo com a chave como está fazendo com que o consumo em si não sobe praticamente nada excelente e aí galera mais uma aplicação avançada em programação
de microcontroladores pique tenho certeza que esse projeto trouxe muitas outras idéias para você desenvolver em cima utilize este algoritmo aperfeiçoou e ele se as nossas vídeo-aulas de pink tem bastante conteúdo espero que tenha gostado e mais esta clássica de sexta no seu wr kit xenon esse foi mais um vídeo de engenharia eletrônica nossa clássica vídeo aula de sexta-feira não clicou em gostei porque agora essa aula feita com todo o carinho pra você tenho certeza que aprendeu bastante deixe seu like importante em acompanha o conteúdo do canal mais de dois mil e 500 vídeos entre cursos
sérios projetos e tutoriais isso é engenharia uso intencional da ciência valeu sua audiência de sempre me siga no instagram twitter e a fan page wr kits no facebook aquele abraço ótimo final de semana e até a próxima