Ok eh nós chegamos num ponto que é um ponto Vital pro encaminhamento do problema dinâmico né porque orora nós vamos estabelecer as condições para calcular a resposta dinâmica de um sistema de n graus de liberdade quer dizer tudo que nós desenvolvemos juntos desde o sistema de um grau de liberdade vibração livre sem amortecimento vibração livre amortecimento vibração forçada com amortecimento n tudo isso ser para que a gente possa avançar na hipótese da superposição modal então é muito importante que a gente Pense um pouco do que nós fizemos até agora né quando a gente saltou pro
sistema de n graus de Liberdade nós passamos pela análise modal né análise modal quando você pega um modelo em finitos que tem vários graus de liberdade pode ser milhares ou milhões e você monta o modelo você tem a matriz de rigidez eu tô falando da estrutura inteira e você tem a sua matriz de massa quando a gente aplicou nas equações Gerais né o equilíbrio dinâmico na forma matricial que é essa equação aqui só que você não tinha amortecimento e não tinha força era vibração livre amortecida sem amortecimento perdão eu tô falando disso aqui ó eu
tiro isso aqui a estrutura tá vibrando na sua frequência natural e cada um dos nós ou graus de liberdade tem a mesma frequência de vibração as amplitudes que são diferentes o que eu quero dizer é o seguinte se você pegar uma massa e uma mola e deixar essa massa aqui ela tá em equilíbrio a frequência natural já tá definida para ela ela pode não estar se movimentando mas aquilo é uma característica intrínseca do sistema se eu pegar aquela massa e eu tirar da posição de Equilíbrio e abandonar independente da amplitude ele vai vibrar com a
frequência ra k so M isso tá definido é que o sistema de de um grau de liberdade Ele só tem um grau de liberdade Ele só tem uma possibilidade de movimento então ele só tem uma frequência natural agora se eu chegar nesse sistema de um grau de liberdade começar a excitar com uma força Ele vai se movimentar e se essa força atua né na direção do movimento né da frequência natural porque não adianta eu aplicar a força aqui na vertical que não vai acontecer nada eu tenho que aplicar uma força que excite esse modo e
Aqui só tem um o modo é esse a frequência natural já tá definida he é é congênita o cara já nasceu com ra k so M aí quando eu começo a esitar estrutura aí é uma outra história a a a amplitude da resposta depende daquele fator de amplificação dinâmica 1 so 1 - R qu 2 que se R qu em particular se não tiver amortecimento que se é zero mas o sistema responde por intermédio da amplificação dinâmica agora quando eu pego o sistema e eu apenas tiro da posição de Equilíbrio e abandono ele vibra na
sua frequência natural com essa frequência é quanto que vale a amplitude de vibração sei lá depende do valor inicial que eu dou se eu tiver 200 massa mola com a a mesma mle e a mesma massa todos vibram com a mesma frequência raiz k so M todos têm a mesma frequência natural agora a amplitude depende do valor inicial que eu dou Isso é um problema de valor inicial agora quando eu tenho forçado a amplitude da resposta vai depender da frequência e da força né aquela força senoidal que eu aplico Essa é a questão que eu
quero dizer é o seguinte quando a gente Partiu pro n graus de liberdade a gente montou a equação de frequência né nós partimos de um princípio aqui não pode ficar vamos condensar tudo que a gente falou ó essa estrutura tá vibrando aqui na sua frequência natural que que eu posso jurar é que cada um desses graus de liberdade Tem uma função do tipo a seno de Ô T porque é uma massa e uma mola e o sistema massa mola vibra naturalmente naturalmente eu tô falando eu tirei da posição e abandonei ele tá abandonado a si
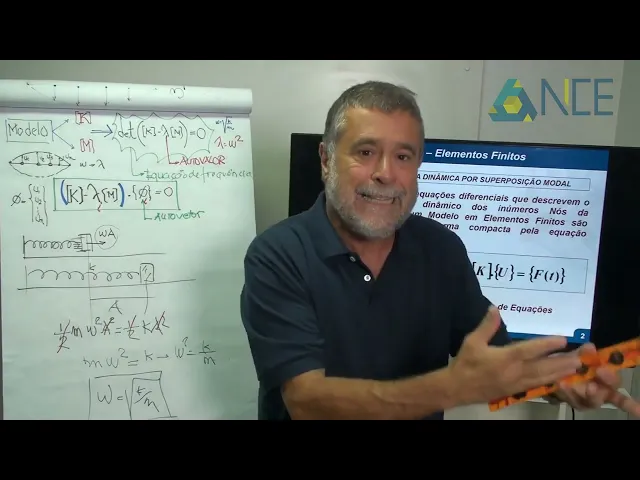
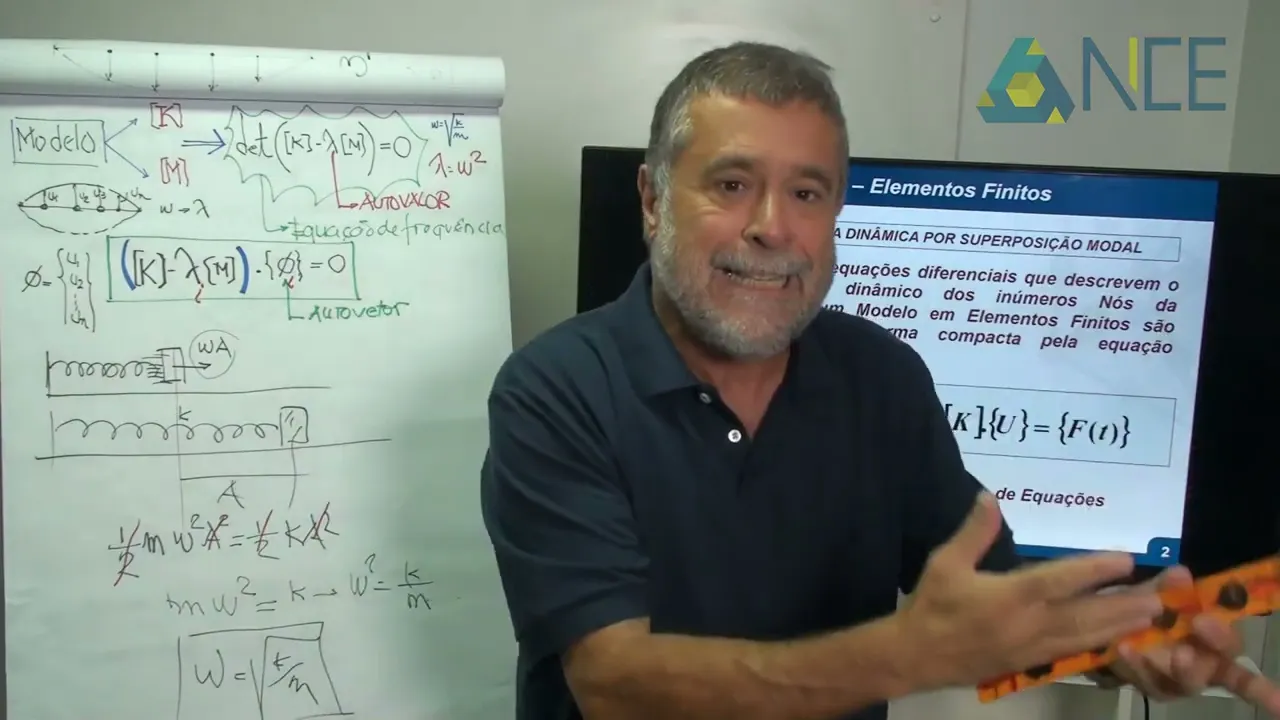
mesmo a função é a seno de Ô T quando a gente fez isso daqui pros n graus de liberdade a gente gerou um problema que levou a isso como é que a gente calcula as frequências naturais porque um sistema de vários graus de liberdade pode ter várias frequências naturais eu preciso conhecer a matriz de e eu preciso conhecer a matriz de massa aí eu monto uma terceira Matriz que é o k - m onde Á é o quadrado da frequência natural isso na hora que eu monto o determinante dessa raiz ser igual a zero nós
vamos buscar Quais são os lambda ou os quadrados da frequência quizeram essa Matriz Isso é um problema de a valor aí nós calculamos as frequências naturais após calcular as frequências naturais o primeiro modo tem um lambda que é o quadrado da frequência segundo modo tem o amb 2 o amb 3 eu vou buscar Qual é o shape Qual é a forma deformada que corresponde a esse modo Quando eu digo isso eu tô falando deste treco aqui ó ó ó a estrutura vibrando ela tem um modo de vibrar e tem essa deformada que corresponde a esse
modo ela pode ter um modo assim por exemplo isso quer dizer que se eu der ção deformada inicial do segundo modo ela fica vibrando no segundo modo com a frequência do segundo modo Tá certo a questão subsequente que nós vamos entrar daqui a pouco é que quando eu coloco um carregamento ele pode ter um perfil que excite um determinado modo ou uma parte do carregamento excitao o modo outro excito outro e aquele modo vai amplificar mas isso nós vamos fazer agora o que sobreviveu dessa conversa é que olha eu peguei um exemplo simples mas muito
definido né isso aqui eu tenho uma estrutura que eu tô dizendo é que essa estrutura tem um primeiro modo de vibrar é a sua primeira frequência natural e a primeira frequência natural tem esse Shape aqui esse mold Shape esse modo de onde saiu isso isso saiu daqui nós resolvemos o problema de alto valor e depois o problema de Alto vetor fizemos um exercício sobre isso isso quer dizer o seguinte se eu abandono a estrutura nessa condição ela fica vibrando na sua frequência natural e aqui eu tenho massa mola aqui eu tenho massa mola o que
eu quero dizer é aqui no modo natural ou normal de vibração todos os graus de liberdade vibram com a mesma frequência isso daqui é um segundo modo de vibrar todo o povo que tá aqui esse cara esse cara esse cara vibra com a mesma frequência que a frequência do segundo modo e esse é o al vetor correspondente ao segundo modo esse aqui é o terceiro modo de vibrar como é que eu penso fisicamente da mesma maneira eu tirei a massa da posição de Equilíbrio abandonei ela vibra com a sua frequência com uma certa amplitude que
depende do valor inicial como lá na massa só tem um grau de liberdade só tem um modo de vibrar e só tem uma frequência aqui eu tenho ó eu eu eu abandono eu pego e deforma a estrutura e solto e ela fica vibrando na sua frequência natural deste modo então este é o modo e esta é a frequência e no caso mais geral isso daqui o que eu tô antevendo o que eu tô querendo preparar o espírito é que quando eu meto um carregamento na estrutura é possível nós vamos ver como separar nesse carregamento alguns
componentes dele que excitam esse modo outros que excitam esse modo outros que excitam esse modo de maneira que os modos vão ser amplificados essa exatamente a superposição modal que ainda não mexemos Nós só estamos falando em análise modal Por enquanto aí você fala assim ah mas para que que serve modal Ah eu tenho uma frequência fal ó tem um motor ali que tá trabalhando numa frequência que tá chacoalhando e gerando uma frequência de excitação Ah mas essa frequência de excitação ela tá excitando algum desses modos não sei e como é que eu resolvo preventivamente Ah
eu não quero ter problema dinâmico Ah eu simplesmente projeto a estrutura para não ter nenhuma frequência próxima da frequência do excitador Isso é uma condição conservadora é uma condição suficiente para não ter problema dinâmico você não deixa a estrutura trabalhar próxima da frequência de um excitador se der né tem problemas que isso não é possível não é tão Óbvio assim por exemplo você pega um motor o motor tem uma frequência motor de quatro cilindros tem um harmônico lá que ele fica chacoalhando são várias senoides ao mesmo tempo tem um cara lá que é o o
harmônico de maior energia pô o cara colocou um suporte a frequência coincide com aquela vai quebrar não tem jeito mas isso vai ficar claro na nossa resposta dinâmica que nós estamos iniciando por que que eu tô mencionando tudo isso porque isso é absolutamente importante porque isso daqui é a carteira de identidade dinâmica dessa estrutura e sobre essa estrutura nós vamos colocar um carregamento dinâmico e a questão central da resposta que a estrutura tem a essa excitação a esse carregamento dinâmico depende da frequência de excitação ou das várias frequências de excitação porque eu posso ter um
carregamento que tem várias frequências e eu vou cruzar com as frequências naturais quer dier o seguinte eu posso pegar aqui a frequência e começar a carregar aqui nessa direção não tá excitando esse modo isso tem que ser feito com cuidado tá claro então nós fizemos um exercício de análise modal muito simples a estrutura mas que deu uma dimensão Clara do que que nós estamos falando que que eu quero dizer isso aqui nós pegamos três massas né pegamos três massas duas molas e olha só esse sistema não tá fixado E aí nós calculamos o determinante de
k - m = 0 e calculamos o k - m f = 0 isso aqui é pr calcular o lambda que são os alores os quadrados da frequência e isso daqui são os a vetores e aí nós calculamos e Vimos que tínhamos três frequências naturais porque eu tenho 3 gra de liberdade e a primeira delas correspondia ao movimento de corpo rígido nós falamos que a frequência ela tá contabilizando no fundo a troca de energia o cara no sistema vibracional eu tô trocando energia potencial com cinética potencial elástica né energia de deformação se eu tiver um
carregamento o cara tá andando numa pista e uma parte do carregamento tá fazendo isso ela não tá causando deformação na estrutura a estrutura se desloca mas não se deforma isso é o chamado movimento de corpo rígido agora esse movimento aqui Imagine que eu equacione esse movimento e aí eu faço isso daqui olha só isso aqui tá deformando a estrutura agora vamos pensar o contrário vamos somar os dois efeitos Vamos colocar o carregamento que faz isso e o carregamento que faz isso numa equação só uma parte desse carregamento vai excitar isso aqui quer dizer não vai
ter deformação isso é movimento corpo rígido e aqui eu tenho movimento realmente que causa deformação o que que eu quero dizer com isso se você pegar essa estrutura aqui fizer aqui trazer esse cara para cá trazer esse cara para e abandonar ele vai ficar vibrando assim na sua frequência natural se não tiver amortecimento ele fica a vida inteira fazendo isso é que a vibração se extingue porque você tem amortecimento a questão que eu já tô prevendo né vamos dizer assim estamos preparando o espírito para isso é que se eu excitar essa estrutura isso vai acontecer
no exercício que nós vamos fazer se eu excitar essa estrutura de tal sorte que os carregamentos eles motivem esse modo que você tá vendo aqui ó eu aplico uma carga que faz isso a estrutura vai amplificar dependendo da relação de frequência se a frequência for muito baixa ele vai ficar suavemente aqui agora se a frequência for próxima da frequência natural ele vai comear ficar isso daqui e pode ter até ressonância tá claro que tô falando da mesma maneira Olha aqui eu pego essa mola aqui eu faço assim eu trago para cá e eu levo essa
para cá e abandono o sistema fica assim enquanto esse cara fica fazendo isso esse cara fica fazendo isso se não tiver amortecimento ele vai fazer sua vida inteiro e com uma frequência natural Essa é k so M essa 2 k so m ra do Subo agora se eu colocar um carregamento que motiva esse modo esse modo de formacional vamos dizer assim ele vai poder amplificar dependendo da relação que tem entre a frequência de excitação e a frequência natural e o carregamento motiva a amplificação desse modo tá claro nós apenas estamos fazendo uma leve lembrança do
que nós fizemos na análise modal E aí nós chegamos num conceito importantíssimo esse conceito é absolutamente Vital para aquilo que nós vamos fazer agora eu vou desenhar uma estrutura aqui olha só essa estrutura aqui issso daqui tem uma coordenada física qual é a coordenada física está aqui x y e tem um z aqui que que é isso que eu tô falando quando você abre o software a tela do software aparece aqui no canto x y z depois nós vamos mostrar isso no software aí eu faço aquele Problema que problema este problema aqui para esta estrutura
essa estrutura tem uma matriz de rigidez essa estrutura tem uma matriz de massa aí eu resolvo esse problema eu vou lá e coloco determinante de k - m = 0 aí eu coloco segundo problema k - m x phi = 0 aqui eu vou colocar um lambda i e um fi por que que eu tô fazendo isso porque numa estrutura que tem n graus de liberdade ela pode vibrar de n modos e cada um dos modos de vibração natural todos os graus de liberdade vibram com a mesma frequência Então vamos supor que essa estrutura deformada
esteja vibrando nesta configuração aqui esta seja uma das frequências naturais essa frequência natural aqui é ôa 1 só pra gente lembrar é 2 F1 é Radi por segundo isso é her ou ainda né ela tem um LAMB 1 beleza que é o quadrado da frequência ôa 1 isso aqui é um sistema físico eu tenho vários modos de vibrar que eu tô dizendo é que se eu pegar a deformada disso que é o aut vetor associado a esse modo ó isso aqui que que é o aut vetor F1 ele tem o deslocamento de cada um desses
caras nesse modo que famento aquele que eu dou e solto que é um problema possível indeterminado se eu multiplicar o F1 transposto pelo k e pelo fi1 isso dá uma rigidez generalizada k1 se eu multiplicar o fi1 transposto pelo M pelo próprio F1 isso aqui dá uma massa generalizada M1 isso aqui tem n graus de liberdade agora eu vou aqui e eu construo um sistema massa mola que só tem 1 grau de liberdade aqui pode ter 1 milhão aqui tem um e eu coloco essa molinha aqui k1 e coloco uma massinha M1 se eu fizer
essa conta W1 que é k1 dividido pelo m eu vou ter uma frequência natural que é exatamente essa da estrutura inteira vibrando nesse modulo por isso que isso se chama rigidez generalizada e isso é a massa generalizada associada a esse modo ou é a massa modal e a rigidez modal se eu fizer o segundo modo terceiro modo e assim por diante para cada modo que eu tenho uma w eu tenho al vetor e eu tenho um k e eu tenho um mi se eu calcular a raiz quadrada de k pelo Mi no sistema de 1
gra de liberdade vai dar exatamente a frequência da estrutura inteira portanto Esse é um sistema generalizado is é absolutamente VIT vai fazer a superposição modal porque a hipótese da superposição modal vai usar um conceito que nós vimos também qual é o conceito conceito É esse aqui se você pegar o f j transposto vezes o k e vezes o fi se o I for diferente de J isso dá zero é a propriedade de ortogonalidade Ou seja você tem vários modos de vibrar se você fizer essa conta onde esses dois modos são diferentes isso dá zero da
mesma maneira se você pegar o fi j transposto m fi i diferente de J dá zer isso equivale aqueles vetores nós estamos falando de uma base n ortogonal se você calcula 100 mdulos de vibrar de uma estrutura cada modo de vibrar corresponde a uma a um vetor que é um al vetor são os vetores de espaço n vetorial de uma base aí é que nós vamos dar a o salto pra superposição modal que é a hipótese da superposição modal que Alguns chamam de hipótese de rits Ele tá dizendo que a resposta dinâmica é a soma
dos modos de vibrar onde cada modo entra com o fator de participação e quem é esse fator de participação Esse é o grande descobrimento que nós vamos fazer agora então o que que é isso isso aqui é a equação de um sistema de n graus de liberdade vibrando sobre ação de um carregamento externo que pode ser senoidal pode ser periódico pode ser o impacto ou pode ser um carregamento dinâmico que você mediu numa pista essa equação é a lei de Newton aplicada pros n graus de liberdade da estrutura como um todo o que que diz
a hipótese da superposição modal que é a resposta dinâmica se você você pegar o primeiro modo que é o fi 1 você pegar o fi do você pegar o fi3 se você somar todos esses modos você vai ter a resposta em cada instante da estrutura deformada Olha só nós vamos provar que isso é verdade o que eu quero dizer é o seguinte A análise modal ela reflete o comportamento dinâmico básico da estrutura ela é uma indicação de como a estrutura vai responder ao carregamento dinâmico a gente de certa forma deu esse Indío ao mostrar aqueles
vários modos ali porque uma parte do carregamento pode citar um modo pode citar outro de uma maneira formal eu poderia dizer que a resposta dinâmica é o primeiro mdulo multiplicado por um fator o segundo modo multiplicado por um fator até o modo n multiplicado por um fator como é que eu energo isso geometricamente graficamente fisicamente é isso aqui olha só isso é hipótese né vamos ver se isso Corresponde à realidade agora eu tô falando da resposta mesmo não é análise modal eu tenho uma estrutura e eu começo a carregar a estrutura aqui né pode ter
força aqui pode ter força aqui ó genericamente eu tenho uma deformada essa estrutura sobre ação do carregamento ela vai se deformando em cada instante e eu preciso saber a fotografia em cada instante dessa deformada porque eu vou ter como é que a tensão varia ao longo do tempo e fazer previsões sobre a vida desse componente tá clara essa figura aqui isso representa uma estrutura e as forças que agem na estrutura de onde vem essas forças é Pode Vir do vento pode vir a força aplicada devido a gente externo qualquer pode ser até um enforce de
motion olha aqui ó porque a gente já viu que o enforce de motion é a mesma coisa que a estrutura tivesse parado eu tivesse carregamento aplicado nela o qual é a hipótese da superposição modal ó Isso aqui é muito parecido com isso olha olha aqui você aqui é o primeiro modo de vibrar Esse é o segundo modo de vibrar Esse é o terceiro modo de vibrar e assim por diante eu tô falando a mesma coisa isso aqui é o primeiro modo de vibrar da estrutura como é que eu interpreto isso se você tirar esse cara
da posição de Equilíbrio dessa forma e abandonar ele fica vibrando dessa forma esse aqui é o segundo se você tirar e abandonar ela vai ficar vibrando assim se você tirar dessa forma e abandonar ela vibra assim isso aqui são os valores de frequência natural todo esse povo que tá aqui ó o um é o deslocamento um do modo um deslocamento do modo um e assim por diante todo mundo vibra com a a mesma frequência todo mundo vibra com a mesma frequência o que eu tô dizendo hipótese da superposição modal é que você multiplicar um fator
por esse F1 multiplicar um fator por esse F2 e um fator y3 né que aqui só tá o y y3 x F3 Se você pegar isso e multiplicar pelo y1 multiplicar isso pelo Y2 multiplicar isso pelo y3 e somar você vai ter a resposta nesse instante Isso é uma hipótese proposta pelo rits na suposição mudal Se isso for verdade então eu vou substituir na equação de Equilíbrio que equação nessa daqui ó nesta equação aqui ó tudo isso aqui nós já falamos né Fazer uma conta junto com vocês aqui eu vou substituir nessa equação matricial m
o dois pontos só tô tirando o símbolo de Matriz né para não ficar seu ponto mais ku igual a FT isso aqui é a matriz de massa acelerações nodais Matriz de amortecimento Matriz das velocidades nodais Essa é a famosa Matriz de rigidez da estática Essa é a matriz dos deslocamentos nodais e essa é a matriz das forças externas que variam com o tempo de alguma forma pode ser senoidal pode ser periódica pode ser o impacto pode ser o que for o que eu tô dizendo é que se isso aqui por hipótese é é a solução
do meu problema se eu pegar isso e substituir nessa equação essa equação é resolvida né nós já fizemos isso é quando já tinha mu 2 p mais ku se não achava que era a seno de eg T substitui Qual foi a consequência disso a consequência foi que você calculou que raiz de k sobre n quando você tinha uma vibração Liv amortecida Qual foi a consequência de subir na função a elevado a menos que n t sen de + PH Ah e quando você tinha a vibração forçada senoidal a resposta era senoidal você substituí na equação
Qual é a resposta f0 so k 1 Ra 1 - R qu 2 que R qu sen de Ô T - PH De onde veio isso isso veio da substituição da solução na equação que você queria resolver essa é uma técnica para resolver qualquer problema Você tem uma equação diferencial do fenômeno físico Você tem uma equação que você desconfia que é a solução você vai lá e substitui Aí surge a surpresa do problema né o que eu tô dizendo em última instância é isso olha aqui ó esse cara aqui ó olha o 1 de T
aqui olha o 2 de T Olha o TR tá vendo isso daqui ó o u1 o 2 1 o 3 1 1 3 um ó se tu pegar esse cara esse cara esse cara que tá então aqui se tu multiplicar pelos fatores de participação esse vezes esse mais esse vezes esse mais esse vezes esse mais esse vezes esse dá esse cara aqui isso é a superposição modal isso aqui representa a solução do problema dinâmico qual este Tá certo nós estamos fazendo a mesma coisa que nós já fizemos pro sistema massa mola sistema mola com amortecimento
sistema massa mola amortecedora e força externa e substituímos a solução só que agora tem n graus de liberdade a equação que governa o n graus de liberdade é essa matricial e a solução proposta é essa é a hipótese da superposição modal por qu porque eu t superpondo os modos que nós já calculamos ah como que a gente calculou determinante de k m = 0 k m = 0 aqui ó Isso já foi definido agora só falta determinar esses fatores é isso que nós estamos querendo determinar porque os modos a gente já sabe calcular E como
que cada modo participa na resposta alguém tem alguma sugestão se isso daqui é a solução y1 F1 Y2 F2 y3 F3 yn fn se você ou de uma maneira mais compacta né não é muito agradável trabalhar dessa forma porque fica muito tô tô abrindo aqui eu pego esse cara e substituo aqui não foi isso que a gente fez até agora Então é isso que nós vamos fazer vamos fazer só que tem que ter paciência né vamos fazer isso com calma sem ansiedade então primeiro eu vou pegar esse cara aqui e substituir aqui isso aqui não
é a segunda derivada do deslocamento essa equação aqui isso aqui é constante isso é constante o modo não não varia então alguma coisa aqui deve variar com o tempo que é esse cara aqui é uma função que varia com tempo que vai multiplicada pelo modo D como é que a estrutura responde tá claro porque se eu for substituir isso daqui naquela equação e derivar né Isso aqui é a segunda derivada se isso daqui fosse constante seria zero né ou seja como isso daqui não muda que é o modo então isso aqui é que deve ser
a variável né o y1 vamos fazer essa conta eu vou somar isso aqui ou seja quando você pega isso daqui você não tem que derivar duas vezes certo ou não ó Isso aqui é uma soma a derivada de uma soma é a soma das derivadas Então deixa eu colocar isso aqui ó eu vou escrever aqui F1 só que tem a matriz de massa aqui né Matriz de massa tá aqui também é uma constante certo e aqui vai aparecer a segunda derivada do y1 beleza ó m o dois pontos tô derivando esse cara aqui isso aqui
aparece com a segunda derivada isso daqui é constante então a matriz de massa tá definida Isso é uma constante isso aqui é segunda derivada mas tem esse outro cara aqui né que eu vou derivar também né Então pegando o u e calculando só esse termo aqui vai aparecer o m vai aparecer quem o F2 né e aqui vai aparecer o y dois pontos beleza vamos continuar aqui vai aparecer o m vai aparecer o fi3 e vai aparecer o y TR do pontos e Finalmente né Vamos chegar lá Se você pegar todo mundo aqui vai aparecer
o m vai aparecer o f n e vai aparecer o yn dois pontos que que nós fizemos nós pegamos essa solução que a gente acredita se a solução e substituímos primeiro aqui como isso aqui é uma soma a derivada da soma e a soma das derivadas então nós estamos expandindo esse negócio aqui agora vamos pegar esse povo que tá aqui quem é que vai aparecer aqui vai aparecer a matriz de amortecimento né E vamos substituir a equação lá vai aparecer o F1 e vai aparecer o y1 primeira derivada quer dizer nós estamos pegando esse povo
todo aqui e substituído aqui beleza e agora nós vamos fazer isso aqui vamos pegar o outro lá que é o c vezes o fi2 e vezes o Y2 ponto mais substituição direta apareceu C tudo Matriz isso aqui hein vai aparecer o fi3 vezes o y TR pon e mais finalmente você vai ter o c você vai ter o f e você vai ter o yn ponto beleza pegando isso e substituindo aqui aqui agora falta substituir aqui eu vou pegar esse U E vou colocar aqui como vai ficar vai ficar k que multiplica fi1 x y1
+ k fi2 que multiplica Y2 + k fi3 que multiplica y3 e mais k f n que multiplica yn Isto é igual ao valor do F de T beleza que que nós estamos fazendo ó S só só para não perder o f quando você estudou o movimento harmônico você falou a função que resolve a equação n dois pontos ku é do tipo a seno de OM T + x0 aí você foi lá colocou na equação e provou que k é √ k so e quando você estudou o movimento harmônico amortecido você propôs uma função substituiu
você provou que a solução era do tipo a elevado e elevado a- que C ôn sen de Ô t + f quando você tinha a solução particular para resolver para um grau de liberdade você propôs se a excitação cidal a resposta era senoidal que que o que que decorreu da substituição você provou que a resposta dinâmica era f0 so k que multiplica 1 √ 1 - R qu 2 que R qu que é o fator dinâmico multiplicando seno de Ô T - phi onde fi é o atraso pelo fato de existir o amortecedor ISS é
uma técnica que que você tá fazendo aqui você tem uma equação dinâmica matricial E você tá propondo essa solução se essa equação satisfaz isso aqui nós estamos substituindo aqui tá certo tem alguma coisa de diferente da lógica A lógica é sempre a mesma não muda nunca Ainda bem né Vamos fazer uma conta agora eu vou fazer uma conha aqui que é o seguinte eu vou pegar toda essa equação e eu vou multiplicar os dois membros por o mesmo valor É como se eu tivesse aqui este cara igual a se eu PR multiplicar aqui por um
valor e aqui por um valor a equação não altera Beleza então vamos fazer isso eu vou pegar aqui e vou multiplicar só para exemplificar pelo F3 transposto então todo mundo vai ser multiplicado pelo F3 transposto todo mundo multiplicando pelo F3 transposto olha só eu não tô alterando essa equação certo e aqui também né Olhe bem para esta equação tempo mas olhe mesmo olha com uma vontade assim tá olhando para essa equação olhe para este cara aqui quanto é que vale fi3 para imposto n x fi1 Vai pensando aí quanto vale fi3 transposto M fi2 esse
carinha aqui daqui a pouco a gente fala dele quanto vale F3 transposto M fn Quanto que vale F3 transposto C F1 Quanto que vale F3 F2 quanto é que vale esse cara aqui quanto é que vale esse cara aqui quanto é que vale esse cara aqui quanto é que vale esse cara aqui Alguém pode me dizer propriedade de ortogonal eu posso jurar na Bíblia aqui nós já provamos nós provamos por três caminhos nós F lá e verificamos no Exercício depois nós fos na geometria analítica e vetores e provamos também só falta mostrar no software que
nós vamos mostrar que já mostramos né aliás né Aí nós mostramos no software não mostramos Olha só isso aqui vale zero cara qu que vale isso daqui ISO que vale zero é a propriedade ortogonalidade ó a velha lá ortogonalidade dos vetores que são n ortogonais quanto é que vale isso daqui isso aqui vale zero quanto é que vale isso daqui vale zero quanto é que vale isso daqui vale zero quanto é que vale isso daqui vale zero Quanto é isso aqui zero Quanto é isso aqui Zero nossa tô passando um rastelo aqui no sou não
ficou Pedra Sobre Pedra quem é que sobrevive disso Ah quem sobrevive disso é esse cara aqui o que que é TR transposto mf3 não é a massa generalizada que a gente calculou então aqui eu vou colocar aquele mezin diferente massa generalizada M3 quem é este cara aqui que sobreviveu a essa tempestade ortogonal aí é esse carinha aqui que eu vou chamar de amortecimento Prado C3 porque é o amortecimento de reic que atende a propriedade de ortogonalidade e quem é esse carinha aqui que sobreviveu também ao tsunami aqui da ortogonalidade este cara aqui melhor dizendo este
aqui isso daqui é a rigidez generalizada com3 vamos escrever isso daqui tô dizendo o seguinte eu tenho uma massa M3 e eu tenho um carinha aqui que é um y3 do pontos depois eu tenho um amortecimento C3 que multiplica 1 y3 pontois pois eu tenho um K3 que multiplica um y3 e isso aqui é o produto do fi TR vees uma força bom isso aqui é uma massa generalizada isso aqui é um amortecimento generalizado isso é uma rigidez generalizada que nome que eu vou dar para isso ah eu vou chamar isso daqui de força generalizada
F3 Agora me conta uma coisa você já viu essa equação Em Algum Lugar do Mundo m y do pontos c y ponto k y iG FT o que que é isso aqui que é essa equação y dois pontos c y ponto Ky = f de T isso equação de qu precisa desenhar precisa agora aqui precisa desenhar lembra ah precisa desenhar precisa eu vou desenhar um aqui ó eu vou desenhar um negócio assim eu tenho uma mola aqui que é o 3 Eu tenho um amortecedor aqui que é o C3 eu tenho uma massa aqui que
é o M3 e agora eu vou colocar uma força aqui que é o F3 do temp e aqui eu vou ter uma resposta que é o y3 o que que é isso aqui hein isso aqui é um sistema massa mola amortecedor e força onde isso aqui é a rigidez generalizada Isso é amortecimento generalizado isso é a massa generalizada isso é a força generalizada e isso é o a coordenada generalizada isso daqui é chamado de coordenada generalizada ó coordenada generalizada ou coordenada modal que que eu quero dizer o fator de participação de cada modo na resposta
é dado pela solução de um sistema de um grau de liberdade o que eu quero dizer é que a cada modo de vibrar você associa um sistema generalizado por intermédio do qual você calcula o fator de participação daquele modo na resposta Essa é a superposição modal o que eu quero dizer é o seguinte até olha só que interessante a força a força generalizada ela tem a mesma cara da força que age na estrutura se a força que age na estrutura senoidal o sistema generalizado tá so ação uma carga senoidal se a força que age na
estrutura é periódica o sistema generalizado tá sob ação de uma carga periódica se a força que age na estrutura é um impacto o sistema generalizado tá sob ação de carga de impacto E se o sistema que a força que age na estrutura é um carregamento geral isso aqui é um carregamento geral também ou seja o problema dinâmico envolve integração só que você transferiu o problema da Integração para uma maneira mais fácil porque resolver uma equação dessa é integrar Mas isso é só tirar da manga do colete Já tá pronto pô qual é a solução dessa
equação aqui ela tem um transitório e um permanente é por isso que a gente estudou o sistema de grau de liberdade o cara que estuda um sistema dinâmico do n graus e não passou por isso o cara surtou né ele não tá no juízo perfeito e cara faz isso uma matriz de mass uma de AM e vamos fazer a superposição modal a modal por definição é dado por um fator Como assim para meu quer dizer o seguinte a estrutura inteira juridicamente para cada é representado por um sistema de um grau de liberdade e é por
intermédio dele que você calcula a participação daquele modo na resposta se ele vai ser importante ou não se esse sistema generalizado tiver uma amplificação enorme aquele modo vai participar de uma maneira muito intensa na resposta dinâmica mais do que outro nós vamos fazer isso no Exercício nós vamos ver isso isso é fisicamente visível que fizemos foi isso né Nós multiplicamos T aí fo uma pergunta Quem vai sobreviver desse tsunami ortogonal aí né que sobreviveu Então você fala Ah então se eu começar fazendo multiplicando por Fi um transposto quem sobrevive é só o fi um sim
ah então eu posso fazer genericamente por um grau ó F que nós fizemos foi isso Quem sobreviveu na equação foi isso E aí surgiu essa equação que nós fizemos juntos aqui aí você fala quer dizer que então para cada modo de vibrar eu posso aplicando ortogonalidade gerar um sistema de um grau de liberdade massa mola amortecedor e força cuja resposta dele dá o fator de participação do modo na resposta sim é o que tá escrito aqui ou seja se você tem tem n modos de vibrar você vai ter n equações dessas que por intermédio dela
você vai calcular o fator de participação que é o y Ah você tá integrando tá porque isso aqui é uma equação diferencial só que você não tá integrando o conjunto inteiro você desacoplante de equação diferencial e transformou em vários probleminhas escalares em que cada um você mudou o domínio da ação você criou coordenadas generalizadas isso aqui não tem nada a ver com a coordenada física da estrutura Resumindo em poucas palavras qual é a lógica do cara fazer a análise modal e depois calcular a resposta dinâmica nós vamos fazer isso no Exercício primeiro você os modos
e as frequências naturais que que eu tô falando alto valores e alto vetores já fizemos isso já aliás nós vamos fazer um exercício em seguida que resume o curso inteiro P esse exercício tem que fazer umas 10 vezes cara e com carga cidal depois nós vamos repetir com carga periódica com impacto depois que você fez isso você tem que calcular massa rigidez amortecimento e força generalizada para cada modo porque você você vai montar uma equação desse tipo para cada modo ah quantos modos eu escolho aí nós vamos discutir depende do carregamento Tá certo depende da
energia que tá sendo fornecida por isso que toda vez que você vai fazer uma análise modal para depois calcular a resposta dinâmica você precisa conhecer o carregamento para saber quais modulos que você vai calcular na sua estrutura que são importantes pro cálculo da resposta aí você vai resolver o sistema generalizado para calcular o y de cada modulo E aí você vai fazer a superposição modal em poucas palavras eu quero dizer o seguinte olha aqui ó Isso aqui é estrutura sobre o carregamento dinâmico Esses são os modos a cada modo de vibrar você associa um sistema
de um grau de liberdade e aí você pega e calcula o y que é a resposta do sistema de um grau de liberdade o que que eu tô falando eu tô falando daquilo lá do transitório mais o permanente acabou tem 10 modos de vibrar tem 10 sistemas de um grau de liberdade no sistema generalizado tem 10 funções o y varia com o tempo porque o modo não varia com o tempo e aí você faz a superposição modal se você multiplicar isso aqui pelo Y num dado instante o y aqui no dado instante num dado instante
você multiplica pelos correspondentes Y você tem nesse instante esse valor Ah mas varia com o tempo então como isso aqui também varia com tempo você vai sempre calcular a resposta dinâmica tá claro nós vamos parar para respirar um pouco e nós vamos fazer esse exercício aqui que é um sistema que tem vários graus de Liber dade e nós vamos resolver o carregamento dinâmico que é uma força senoidal e ver como que a estrutura responde a esse carregamento e nós vamos passar por tudo isso vamos fazer aquele planejamento nós vamos calcular rigidez nós vamos calcular a
matriz de rigidez a matriz de massa nós vamos calcular as frequências naturais nós vamos calcular os modos de vibrar nós vamos calcular a massa generalizada para cada modo a rigidez e a força generalizada E aí nós vamos fazer a superposição que é a resposta dinâmica e vamos enxergá-la no domínio do tempo e depois entender o que que é apresentação do fenômeno no domínio da frequência tá claro