E aí a pular algumas funções são muito utilizadas para acionar inversores de frequência Neste vídeo veremos os comandos gira para start-stop e avança o retorno aplicadas ou inversor de frequência cfw500 a função gira do inversor quando ativada liga o motor por rampa de aceleração até a velocidade de referência e quando desativada ou seja para desliga o motor por rampa de desaceleração até parar nesse vídeo faremos utilização desse recurso comandado por uma entrada digital parametrizada para a função gira para no comando gira para também chamado de liga-desliga ou ainda comanda dois fios é recomendado a utilização
de um bloco de contato normalmente aberto associado ao computador de atuação fixa conectado à entrada digital do módulo plugin Vale lembrar que para este exemplo Vamos considerar como base o módulo plugin padrão cfw500 heos II os outros módulos plugin usuário deverá atentar-se na identificação dos Bornes relacionados ao modelo escolhido ao identificar os Bornes da respectiva entrada digital e será utilizada para esta função esse exemplo usaremos a entrada digital de íon ou seja Bornes um e 16 para conectar o contato normalmente aberto Isso significa que ao comutar fechar ao seu contato 1.na transmitindo o sinal a
entrada digital de íon após realizadas as conexões físicas uma parametrização básica se faz necessária considerando que o inversor de frequência já está com o padrão de fábrica e os dados de placa do motor inseridos no inversor sugere-se ajustar o p221 que é seleção remota p222 em Zero Onde temos a referência de velocidade em remoto pelas teclas da HDMI p227 em um que é seleção gira para hein Bom dia entrada digital e por fim p263 também um que é função da entrada digital de um para o comando gira para concluída as conexões físicas e ajustados os
parâmetros vemos aqui uma representação de operação para o comando gira para dois fios ou seja como lutando com o nome para a posição liga fecha seu contato DNA e o inversor irá acionar o motor até referência de velocidade ajustado pela HDMI neste exemplo 30 redes como tanto para a posição desliga abre seu contato n a e o inversor irá desligar o motor respeitando a rampa de desaceleração o próximo comando start-stop também chamado de liga-desliga 3 fios onde com o uso e botões pulsadores podemos ligar e desligar o motor sem a necessidade de utilizar contato externo
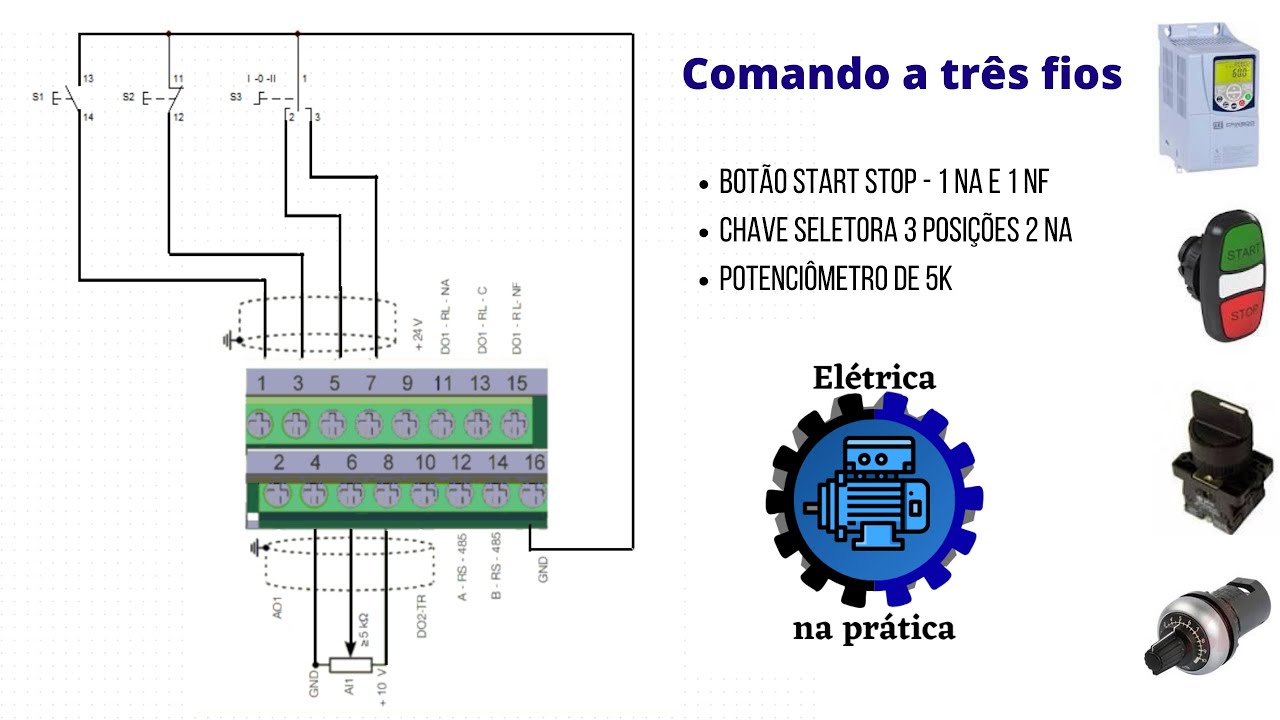
ao inversor para fazer o selo de retenção e em outras palavras precisa ser de dois sinais de comando conectados nas entradas digitais neste exemplo a entrada digital de um Bornes 1:16 receberá o sinal de contato normalmente aberto do botão liga para a função estática EA entrada digital Day 2 Bornes 3:16 receberão o sinal de contato normalmente fechado o botão desliga para a função Stop Lembrando que esses sinais serão executados por comandos de pulsos nas botoeiras e em seguida deve-se ajustar alguns parâmetros no inversor para que a função liga e desliga por comanda três fios possa
ser executada neste exemplo recomenda-se p220 em um seleção remota p222 em 0 ou seja referência de velocidade remota pela hm a 227 em um que define a origem para o comando gira para na situação remoto via entrada digital e 263 em seis que é a função da entrada digital de um para o comando start e por último p-264 em sete atribui a função da entrada digital dois como sendo Stop nesta representação de operação pode-se observar que basta um pulso no botão liga para que o inversor realize a partida no motor sem a necessidade de acessórios
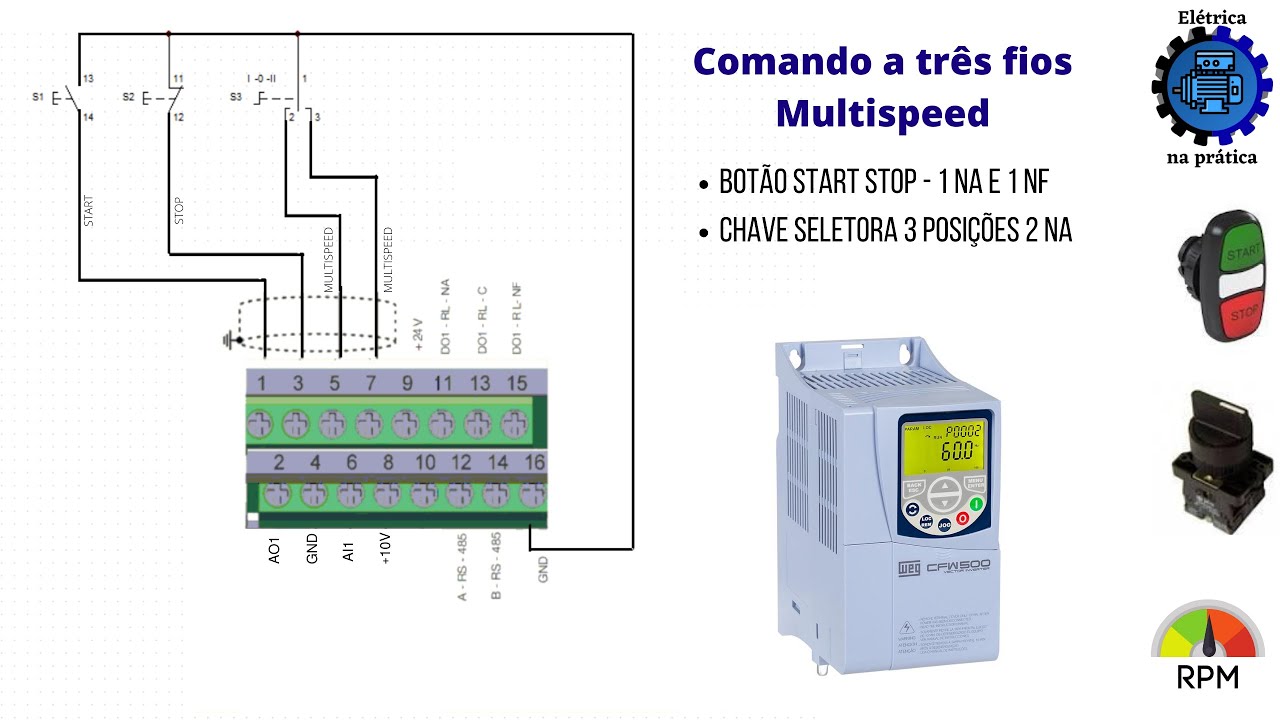
externos por exemplo contato de selo para que o motor permanece em operação e para desligar basta o impulso no botão desliga que o contato normalmente fechado abre e o inversor desligo o motor respeitando a rampa de parada por fim teremos a função avanço e retorno Esse comando é a combinação do gira para com o sentido de giro E para isso precisa-se de dois contato zênia conectados nas entradas digitais um contato na entrada digital de um Bornes um e 16 e receberá nesse exemplo o final da botoeira seta para cima para a função avanço e o
outro contato na entrada digital Day 2 Bornes 3:16 receberá o sinal da botoeira seta para baixo para a função retorno Vale lembrar que para este exemplo utilizaremos contatos e botões pulsadores porém caso o usuário necessite manter acionados por maiores períodos de ver a utilizar computadores com atuação fixa nas entradas digitais na sequência deve-se ajustar os parâmetros no inversor para que a função avanço e retorno seja executada nesse exemplo recomenda-se p221 seleção remota p222 em 10 que é referência de velocidade remota pela hm o p227 em um que define a seleção para o comando avanço e
retorno na situação remoto via entrada digital em 263 em quatro que é a função da entrada digital um para o comando avanço e por fim p-264 em cinco confere a função da entrada digital dois como sendo retorno após finalizada as conexões das entradas digitais e ajustados os parâmetros observa-se nesta representação de operação que ao manter pressionado o botão seta para cima do inversor realiza a partida no motor com sentido horário respeitando a rampa de aceleração até a velocidade de referência e quando os aciona o mesmo botão o inversor desacelera por rampa até a parada do
motor isso também acontece quando pressionamos o botão seta para baixo um inversor troca o sentido de giro e para que o motor para o sentido anti-horário EA desacionar esse contato o motor e da parar esses por algum dos Comandos utilizados nos inversores de frequência WEG para mais ou acesse o nosso site e consulte os manuais do produto Muito obrigado e até a próxima