bienvenidos a este tutorial en esta ocasión vamos a platicar de polos y ceros de una función de transferencia cuál es su significado y cómo se pueden calcular usando matlab bueno pues una función de transferencia puede ser representada de la siguiente manera pues es la división de dos polinomios con respecto de s si nosotros tomáramos el polinomio de s el numerador y lo vamos a 0 y resolvemos para s esos serían los ceros de la función transferencia si tomamos en el denominador el igualamos a 0 y resolvemos para s esos valores serían los polos de la
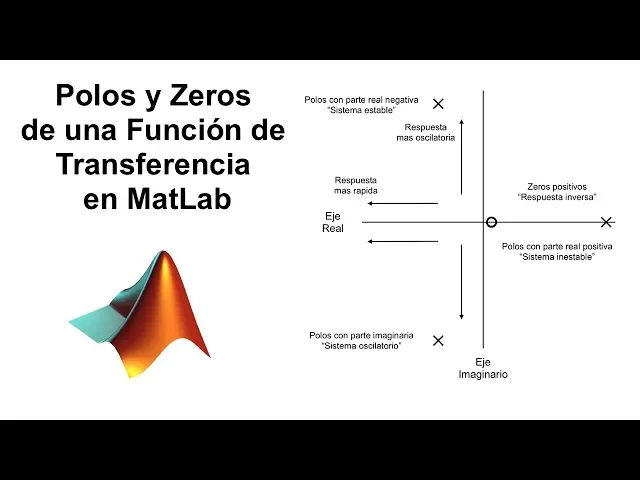
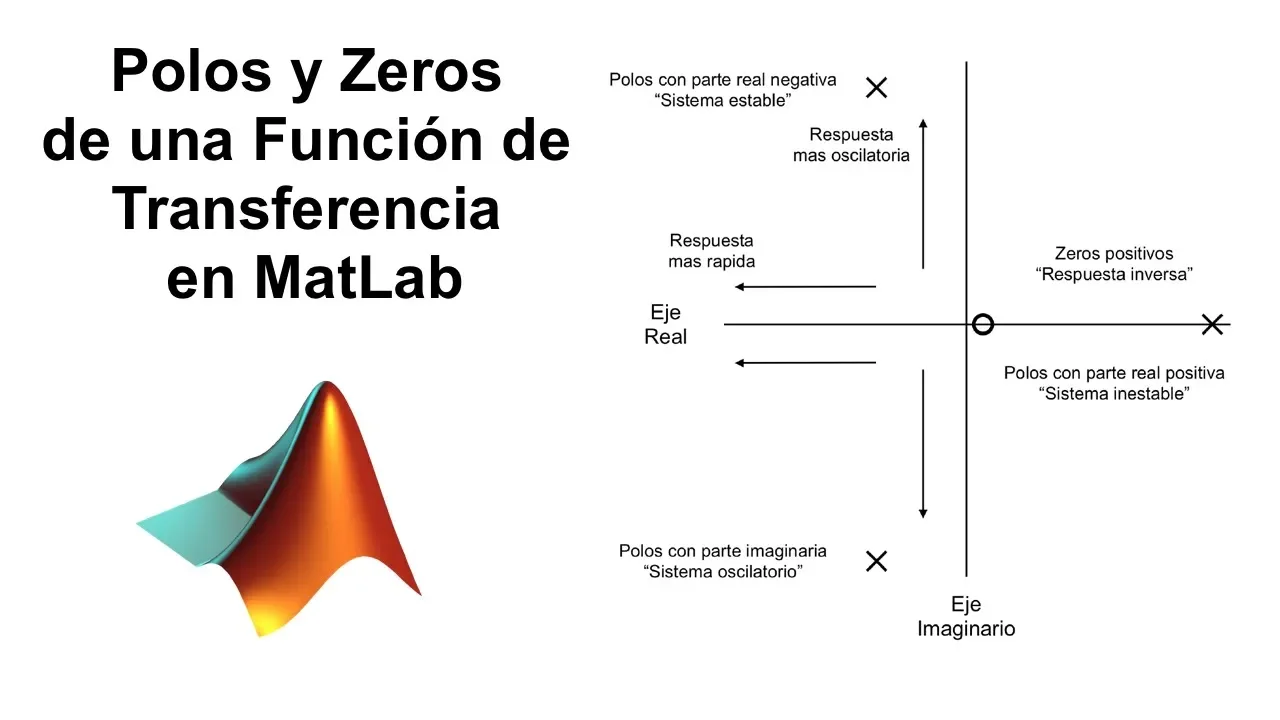
función de transferencia ahora para explicar qué significa qué significan los polos y los ceros voy a ayudarme de la siguiente figura esta figura es un plano real imaginario en el eje de las abscisas tenemos el eje real y en el eje de ordenadas tenemos el eje imaginario en esta figura están representados los ceros como unos círculos y los polos como unas equis ok bueno si los polos y al resolver el polinomio de el numerador los valores de s presentan parte real positiva entonces estaremos hablando de que el sistema presentará un comportamiento con respuesta inversa cuando
le apliquemos un cambio escalón a la entrada ok si presenta parte real negativa o si está del lado negativo en los reales bueno no tiene un efecto como tal no no hay mucho efecto en eso en los ceros si lo importante es ver que si estamos en el positivo tendremos respuesta inversa ahora para los polos un poco un poco más complejo los polos son los responsables de la estabilidad del sistema si los polos en la parte real se presentan en la parte positiva el sistema será inestable pero si se presentan en la parte negativa de
la parte real serán estables si ahora dependiendo del polinomio podríamos tener valores imaginarios en las raíces de este polinomio qué significa tener valores imaginarios en los polos bueno si tenemos una parte imaginaria como lo vemos en este caso hay una parte real una parte imaginaria si una coordenada está en lo real y otra en lo imaginario significa que el sistema va a tener oscilaciones cuando le apliquemos un cambio escalón en la entrada entre más grande sea la contribución de la parte imaginaria más grande sea la parte imaginaria pues el sistema vacilar más y entre más
negativa sea la parte real el sistema será más rápido ok bueno esto es es lo que significan los pueblos sinceros vamos a ver un ejemplo para que esté un poco más claro el ejemplo que vamos a manejar es el siguiente una función gps es igual a 8 s 1 entre 9 s cuadrada más 12 s 1 bueno los ceros ya hemos platicado tomamos el numerador si volvamos a cero y resolvemos para ese en este caso como en el numerador tiene una ecuación de orden 1 bueno pues solamente tendremos un solo 0 ok y este 0
tiene un valor de en este caso de menos un octavo o lo que es igual a menos 0.125 como el el perdón el 0 y el 0 es negativo no tenemos respuesta inversa ok bueno qué pasa con los polos tomamos la parte del denominador luego hablamos a 0 y como esta es una ecuación de segundo orden presentará dos polos vamos a tomar la ecuación general de la ecuación cuadrática la fórmula general de la ecuación cuadrática en este caso podemos ver que el valor del 9 el db es 2 y el de 61 si nosotros sustituimos
bueno pues aquí tendríamos la solución para este esta ecuación cuadrática si simplemente quise mostrar cómo se hace la factorización aquí en la parte de la raíz negativa ok cuando tengo un 32 negativo en la raíz lo que hice fue factorizar para obtener un menos raíz de menos 1 raíz de 32 multiplicadas debería dar raíz de menos 32 y al resolver las divisiones bueno tenemos a esto ok donde es el número imaginario que representa la raíz de menos 1 este sistema presenta dos polos y en la parte real es negativa colores con un color azul sería
la parte real y este sería la parte imaginaria ok seguro lo que acabamos de revisar si están en la parte real negativa el sistema va a ser estable ok en la parte real negativa -0 punto 111 y al presentar parte imaginaria + 0 punto 314 y menos 0.3 cientos 14 ahora el sistema presentará oscilaciones es sería la conclusión ahora en matlab si vamos a cargar la función de transferencia que tenemos como ejemplo sí bueno el comando para cargar la función transferencia es asignar una variable en este caso g así la llama igual a t efe
paréntesis y entre corchetes irían los coeficientes de los polinomios de la función transferencia ok la función transferencia era 8 es más 1 entre 9 s cuadrada dos más dos es más 1 es decir tenemos suficientes 81 en el numerador y 921 en el denominador bueno de esta manera se crea la función transferencia y el comando para calcular los ceros es muy sencillo simplemente se asigna una variable en este caso para mí fue zeta ceta igual a 0 entre paréntesis como se llame la función en este caso image y para polos yo asigne a p pero
puede ser la variable que ustedes quieran puede ser igual a paul entre paréntesis estos dos comandos estas dos líneas de comando de código van a calcular los ceros y los polos y este comando peseta deje que si se llama la función transferencia generará un plano real imaginario ubicando los pueblos y los ceros que se calculen entonces bueno vamos a correrlo y podemos observar así que tenemos la función transferencia 8 s 1 entre 9 s cuadrada más 12 s 1 cálculo los ceros y cálculo los polos que son exactamente los mismos que habíamos calculado a mano
si el 0 es menos 0.125 y los polos aquí tenemos menos 0 punto 111 + 0 punto 314 y y menos punto 314 ok bueno esto este comando estos códigos permiten calcular los polos y los ceros de cualquier función transferencia del orden que sea no precisamente de segundo orden vamos a comer por ejemplo otro para que se den una idea ahora es el tercer orden y calculo los tres polos ok bueno regresamos al ejemplo la figura que se muestra aquí en la parte derecha muestra los polos y los ceros en el plano real imaginario real
en abscisas imaginario en ordenadas de repente es confuso porque parte de cero hacia la izquierda pero podemos dar doble clic y cambiar la escala por ejemplo algo así para que se vea el cruce de los ejes real imaginario y pues localizamos los ceros con un círculo si nos acercamos incluso nos va a decir que es el cero y cuánto vale y nos acercamos a las equis nos va a decir que es un polo y cuánto vale ese polo ok bueno esto nos dice según la teoría que si está en la parte real negativa son estables
pero que se presentan parte imaginaria van a oscilar ok como podemos ver eso bueno podemos escribir steve deje así en el código y si lo corremos nos va a generar la gráfica del comportamiento dinámico del sistema ya lo hemos platicado el sistema es estable por tener la parte real negativa y va a oscilar por presentar una parte imaginaria ok es estable alcanza el nuevo estado estacionario pero va a oscilar ok ahora qué pasa si yo voy aquí poner un comentario para volver a hacer el análisis de polos y ceros si le pongo aquí un -8
ok si el -8 en la parte superior de la parte del numerador va a provocar un seropositivo aquí lo vemos ya ubicado en la parte del plano real imaginario y eso según la la teoría que habíamos revisado un seropositivo presenta respuesta inversa como podemos ver si eso es cierto vamos a activar el stick y efectivamente el sistema presenta una respuesta inversa el comportamiento es estable va a oscilar por la presencia de los polos con parte imaginaria pero al tener un seropositivo el sistema va a presentar una respuesta inversa primero baja y luego sube para poder
estabilizarse ok bueno qué pasa si yo tengo entonces voy a regresar al que tenía anteriormente pero aquí le voy a poner un -2 y lo corro bueno observen como el 0 sigue siendo el mismo pero los polos tuvieron un cambio ahora tengo una parte real positiva en el plano real imaginario también se pueden ver ya están del lado derecho del eje del imaginario del 0 hacia la derecha pues y la teoría nos decía que si los polos comparten real positiva se presentan el sistema será inestable ok al estar estos polos en la parte real positiva
el sistema sería inestable vamos a ver qué pasa con la respuesta y efectivamente miren el sistema es inestable no se va a estabilizar ok bueno vamos a ver qué sucede en el lugar de los vamos a ponerle 12 que vamos a correr el código y podemos observar que el 0 sigue siendo el mismo porque no ha habido cambios en el numerador pero en el en el denominador ahora tengo dos polos sigo teniendo dos polos porque escuadra tica pero no tienen parte imaginaria son negativos en la parte real pero no hay parte imaginaria al no ver
parte imaginaria el sistema no va a oscilar vean aquí la ubicación de los polos en el plano real imaginario no se presentan en esta parte se presentan solamente sobre el eje real y tengo dos polos que son solamente comparte real negativos entonces el sistema va a ser estable pero no va a oscilar como vamos a verificarlo a continuación aplicando un cambio en la función transferencia vean el sistema alcanzó el estado estable sin oscilaciones ok bueno qué pasa si yo tuviera dos funciones de transferencia quisiera comprar dos funciones de transferencia vamos a ver qué pasa aquí
vamos a generar otra función que se llame f f igual a efe ok vamos a colocar la misma 81 ok 9 en lugar de dos y le voy a poner 20 g20 1 ok ahora vamos a calcular aquí los polos vamos a poner secta efe aceptación hacer 0 de efe que da lo mismo porque es la misma función transferencia bajo aquí se puede llamar la función como ustedes quieran simplemente yo yo puse esa variable no y voy a poner aquí coma efe en este comando para que la gráfica me muestre dos funciones de transferencia bueno
miren las funciones transferencia aquí es tan tonto lógico mola efe los ceros hemos platicado van a ser los mismos y los polos cambian un poco no son negativos en la parte real son estables los dos pero no tienen un valor en el eje real imaginario con azul se muestra la primera función transferencia se mostrará g si pueden si quieren ver con cómo se se pueden notar cuál es cuál el azul dan clic derecho systems y el que va a ser el azul y el rojo va a ser f bueno ahora la teoría nos decía que
entre más alejados estén entre más alejados estén del eje del origen pues entre más alejado estén del cero más rápido será el sistema en este caso lo que podemos observar que el que está más lejos del origen pues es el azul es decir ok y el rojo está más cerca del 0 y darle aquí un zoom [Música] más pequeño para poder verlo y ahí vamos a ver miren el polo rojo está más cerca del 0 el pueblo azul está un poquito más lejos entonces al estar un poquito más lejos el azul significa que el azul
de ser más rápido que debería ser más rápido como lo vamos a comprobar bueno hacerle un cambio escalón a las dos funciones de transferencia y que lo muestra en una gráfica ahí está si habíamos platicado el azul es más rápido el azul llega más rápido al estado estacionario y el rojo también llega a prestar de un poco más si entonces es son los análisis que se puede hacer a una función de transferencia con polos y ceros espero que les sirva esta información espero sus comentarios cualquier problema que tengan no duden en escribirme bueno eso es
todo por hoy muchas gracias