o Olá se você não me conhece eu sou Professor Doutor Victor Hugo o alvo seu casaco e na aula de hoje nós vamos dar continuidade a temática de processamento de informações as Vamos trabalhar com essa teoria ou abordagem processamento de informação para tentar responder aquela pergunta Central que nós fizemos lá no nosso vídeo anterior que é Como Nosso controlámos o movimento humano então nós já vimos alguns conceitos expliquei a lógica de um controle mais Centralizado trabalhei com a teoria de controle de circuito aberto circuito fechado de Adams também apresentei um fio sobrando para que a
gente possa entender a lógica do processamento de informação Então os estágios que acontecem nível pré-convencional atencional subir atencional o circuito dos maiores de feedback passa por meio atencional circuito mais rápido que não passa com nível atencional e na sequência nós entendemos o conceito de programa motor apresentado por Kylie e foram apresentados Então cinco problemas relacionados esse primeiro ou conceito de programa motor a questão da complexidade capacidade de memória variabilidade de condicionado ao contexto aprendizagem preferência lateral a partir de agora a gente vai tentar solucionar esses problemas e dá seguimento no entendimento ver alguns artigos que
dão subsídios para essa lógica proposta na sequência de programa motor então em virtude dessas limitações apresentadas no programa motor aqueles cinco problemas que estavam no slide anterior aparece um cara que é sensacional sou fã de carteirinha dele que é o professor Richard Schmidt o time que ele faz uma proposta em 1975 que é chamada de teoria diz que me teoria do programa motor generalizado então o que que ele faz ele pega aquele conceito a ideia principal que que ele nos traz de programa motor mas ele a data ele que a DECO um pouquinho esse conceito
para que ele possa tentar superar aqueles problemas anteriores são ao invés de a gente pensar uma estrutura que ela fixa rígida que vai armazenar todos os comandos responsáveis pela organização do movimento o quê se faz é algo mais abstrato mais genérico por isso esse nome de programa O for generalizado vamos ao conceito vamos entender o que que é isso então programa motor generalizado é uma estrutura abstrata na memória que é preparada previamente ao movimento a qual é responsável pela geração de uma determinada classe de movimentos Não repare que ela ainda é uma estrutura armazenada na
memória então a gente tá falando aí no armazenamento Central Mas diferente da anterior quer um comandos específicos quer enviado pelos músculos agora eu penso estrutura abstrata Então eu penso na verdade uma ideia de movimento eu penso na verdade um padrão de movimento que eu estou idealizando em realizar que é preparado previamente ao movimento Ou seja eu preciso ter uma representação é o que estabelecido antes da realização do Movimento Eu estabeleço e meu plano de ação antes da sua realização a qual é responsável pela geração de uma determinada classe de movimentos Essa foi a grande sacada
do Schmidt e não estabelece que para cada ação que eu vá realizar a cada movimento eu tenho um problema motor se assim fosse pense na possibilidade de repertório motor do ser humano é muito grande e infinito a gente não consegue contar Teoricamente para cada variação precisaria ter um programa motor novo aqui já não Schmidt Ele trabalha numa lógica de que cada classe de ação eu vou precisar ter um problema no futuro Então pense lá por exemplo num padrão de movimento do arremesso por sobre o ombro né que ele arremesso conhecido como as minhas de vez
e vou também eu quero pegar um objeto e não sai esse objeto a ideia daquele que armazenado dentro do programa motor generalizados são apenas as informações essenciais para remeter aquele padrão e eu posso ter variações dentro desse padrão Então apesar de eu ter a ideia do que eu quero realizar eu ainda consigo realizar esse padrão de movimento em diversas formas eu posso realizar arremesso mais longo mais curto com mais velocidade mais força uma maior amplitude menor amplitude ou seja todas essas variações eu não preciso tar mandando isso tudo dentro do programa motor generalizado eo armazena
apenas aquele que é essencial para caracterizar essa classe de ação esse arremesso por sobre o ombro e isso vai auxiliar em muito a resolver aqueles problemas foram levantados anteriormente então Mas quais são essas informações a ideia que nós tenhamos um registro na memória que armazena as características invariantes da ação Aqui tá um dos pontos principais eu tenho que entender o que é que são aspectos em variantes alguns colocam como variáveis em variantes que são em alguns exemplos trazidos por Magnus relação temporal relação de forças e sequenciamento na verdade matematicamente a gente consegue demonstrar esses experimentos
se inscrevendo matematicamente o movimento são todas as variáveis relativas todas as variáveis que você Expressa em termos de percentual são variáveis que a gente vai estar chamando de variáveis de relação ou variáveis relativas estão tempo relativo força relativa velocidade relativa aceleração relativa a posição relativa ângulo relativo isso tudo são variáveis que Teoricamente são armazenadas dentro do programa motor generalizado e o sequenciamento também na verdade esse é um conceito que lado a primeira aula a gente pode resgatar que é o conceito de padrão de movimento vocês acordam como nós consertamos padrão de movimento características espaços atemporais
e de sequenciamento que distinguem uma classe de ação de outra Então essas informações são assinatura de um determinado padrão de Teoricamente são essas aqui de matemática a demonstrar suas variáveis relativas que são aquelas que são armazenadas dentro dessa estrutura do programa motor e generalizado o magma em seu livro e dar um exemplo bem bacana que talvez seja de ajuda para tentar entender um pouco melhor esses conceitos não vamos imaginar que nós temos uma música em um dispositivo de som e a gente escute essa música por exemplo quatro instrumentos tá então entra de início a bateria
num certo tempo depois entra o barco e depois entra guitarra e depois entra a voz então a estrutura de tempo Entre um instrumento e outro e a voz é basicamente essa aqui o que que acontece se eu acelerar a música Se acelerar música o tempo Entre esses instrumentos ele diminui mas a proporção que eu tenho do distanciamento entre eles basicamente é o mesmo e se eu deixar essa música mais lento eu aumento tempo entre eles então eu aumento esse espaço aqui mas a proporção que eu vou alterar entre um espaço e o outro ela se
mantém porque ela a relativa se prefeitura mudar esses tempos eu creio um outro ritmo Eu posso ir até uma outra música ou seja seria um exemplo ou na lagoa está mudando o padrão de movimento uma outra situação essa mesma música vamos supor que agora do tamanho dos meus dedos eles são relativos a intensidade do som no volume se eu for aumentando gradativamente esse volume todos os instrumentos aumenta na mesma proporção não tem como eu fazer não ser que eu esteja ele com a mesa de som controlando cada canal de instrumentos durante a gravação mas eu
pego uma um som de uma música que já está gravada Teoricamente se aumentar o volume massa e o volume principal todos os instrumentos sobem na mesma proporção aquele que era mais alto vamos supor que era guitarra continua mais alto a bateria que era mais baixo ela continua mais baixo para que eles foram gravados assim então a ideia que esses aspectos relativos Esses são os armazenados dentro do programa motor generalizado a sequência na qual os instrumentos vão entrar ou a sequência na qual as notas são é uma música é que vão definir uma música Se eu
mudar você conhecer das nossas Eu estou fazendo uma outra composição já uma outra música então magro ele nos dá esse exemplo em seu livro e aprendizagem motora para tentar entender um pouquinho mais essa lógica do que são essas variáveis relativas que são armazenadas dentro do programa motor generalizado e tal mas pode pensa um pouquinho como é que eu tenho uma estrutura que ela abstrata é genérica Então eu tenho estrutura que vai me lembrar apenas Qual é o padrão de movimento só que eu na verdade vou desempenhar um movimento que ele é preciso eu vou desempenhar
o movimento que ele é paramétrico eu Quando eu vou realizar um arremesso por exemplo eu vou saber exatamente aonde eu quero lançar aquele objeto eu consigo estabelecer a força amplitude e ao mesmo tempo tô falando que na verdade a ter uma estrutura que apenas me traz a ideia do padrão de movimento que eu quero realizar bom time teve uma sacada brilhante aqui que na verdade o controle do é diferente da proposta inicial de kiri ele não acontece apenas com programa motor generalizado Eu preciso de uma outra estrutura nós temos um outro consulto aqui que é
muito importante que ele nominado como teoria do esquema ela é chamado de esquema motor ou esquema de recordação que que esse esquema motor primeiro ele é utilizado juntamente com programa motor generalizado a gente vai falar que as duas estruturas elas trabalham juntas elas são complementares segundo o esquema motor e também armazena informações abstratas na memória para que não seja necessário armazenamento literal de todas as especificações de uma calça e movimentos Nossa agora compliquei mais ainda né se eu falei que tinha estrutura abstrata que me trazer só ideia do movimento agora falou que tem uma outra
estrutura abstrata Então como é que eu tenho algo preciso algo paramétrico bem delimitado eu vou explicar por meio desse gráfico aqui tá então que nós temos ali do gráfico do lado direito é um exemplo de uma habilidade motora de um arremesso qualquer então fazer um arremesso a uma certa distância e eu pego uma pedrinha que irá lançar um objeto a uma certa distância no meu eixo isso eu tenho um parâmetro de força o quanto de força eu preciso aplicar os meus músculos para conseguir realizar esse arremesso nas diferentes distâncias e no meu eixo X eu
tenho a distância a qual eu quero lançar essa minha Pedrinha então se eu quero lançar uma distância curta que aquela minha primeira bolinha verde à esquerda inferior à quantidade de força ela vai ser pequena tá na parte mais baixa do meu garfo no eixo Y se eu quiser lançar o Mais longe possível que você tá dando aquela bolinha verde à direita ou superior então a quantidade força que eu preciso ela é muito grande porque a distância é grande é uma relação direta entre as duas variáveis Oi e o quê que é esse esquema motor tá
a ideia diz que no motor é a seguinte Olha se eu pegar essa Pedrinha queres alguns arremessos a uma certa distância por exemplo tem algumas vezes uma distância perto alguma algumas vezes uma distância mais longe algumas distâncias intermediárias Teoricamente você cria um esquema motor um esquema recordação você cria uma percepção acerca de como você deve realizar aquele arremesso para cumprir os seus objetivos ou seja se você pegar uma pedrinha arremessar algumas distâncias Teoricamente você consegue pegar essa Pedrinha tentar arremessar Qualquer distância não necessariamente você vai precisar ter vivenciado todas as distâncias para conseguir arremessar essa
Pedrinha numa distância diferente Essa é a lógica do esquema motor nós não é armazenamos literalmente todas as informações o quanto de força eu preciso para arremessar a uma certa distância mas eu crio um esquema eu crio uma percepção sobre como devo realizar e se a lógica do esquema motor esquema recordação eu sou sem perguntar Victor o que que esse gráfico levo esquema motor eu vou dizer o esquema motor é nossa linha azul alinhado é todo esquema motor Apesar de eu ter vivenciado a remissão nem três distâncias estão caracterizados pelos meus pontinhos verdes Teoricamente eu crie
uma representação que eu conseguirei arremessar esse objeto em qualquer distância - correntinha treinado nela tá por isso que eu motora muito legal também porque esse conceito essa teoria eles fundamentam um método também de aprendizagem que é o método de interferência contextual esse método de consciência de quanto mais variados fura sua prática melhor vai ser a sua prensagem e essa é a lógica do esquema quanto mais você variar quanto mais você conseguir experimentar diferentes situações daquilo que você está praticando melhor vai ser no seu aprendizado tá pra gente consegue verificar por meio desta proposta aqui então
essas informações abstratas elas são responsáveis pelos parâmetros e controle um movimento para diversas situações e nós nominamos essa especificação de como movimento vai ser realizado com esse termo de parametrização do movimento nós falamos que os esquemas motores eles armazenam os parâmetros de controle variáveis absolutas ou aspectos variantes do movimento a ideia então é a seguinte Olha eu tenho uma intenção por exemplo de realizar o movimento eu quero correr eu quero saltar eu quero para o ar eu quero arremessar e o selecione então meu programa motor generalizada aquela classe de ação do arremesso do salto do
suco do chute e essa esse programa motor ele é responsável pelo que nós chamamos da macroestrutura do movimento porque Teoricamente o padrão de movimento é algo maior aquele mais Global posteriormente eu seleciono esse meu esquema de recordação eu venho com esse que motor e eu parametrize esse movimento esse tá bebê se os detalhes desse movimento então estabelecidos e eu quero fazer uma remesso mais longo mais curto movimento mais rápido mais dentro com maior amplitude menor amplitude Essas são variáveis relacionadas a parametrização de movimento então lembrem que dentro de um mesmo padrão esse padrão ele pode
variar a forma com que é feita eu posso realizar esse arremesso arremessando objeto para cima para baixo para um lado e para o outro desde que as suas características invariantes reconhecimento sequenciamento permaneçam eu tô falando do mesmo padrão de movimento e o que é que permite essa variação quem permite são os parâmetros de controle do movimento que são controlados pelo nosso estabelecidos pelo nosso esquema motor então ele tem uma intenção selecionei aquele padrão de movimento que eu quero realizar por meio do meu programa motor generalizado selecionei os esquemas recordação como parametrizar o movimento da esses
detalhezinhos na sequência um manda esse comando para os músculos e o músculo desempenha Então esse movimento Teoricamente só e vai daqui e aquele outro slide Aqui nós temos o fluxograma da dos estádios de processamento de informação nós Já conseguimos elementos para responder àquela questão como nosso controlámos o movimento humano não poderia responder essa questão da seguinte maneira Olha nós compramos assim forma eu tenho intenção A partir dessa intenção selecione o programa autor generalizado que a minha macro estrutura do movimento que estabelece a classe de ação que vai ser realizada posteriormente o parametrizo esse movimento por
meio dos meus esquemas Motores na sequência essa junção da macroestrutura com a microestrutura vai me permitir em que o Estabeleça os comandos com ser enviados para os músculos e eles dizem tem uma ação na sequência o feedback naquele circuito maior vai me auxiliar nas correções de uma maneira perceptiva e que eu tomo as decisões para realizar essas correções mas eu tenho circuito menor que aquele R1 r-2 em que eu vou fazer os alguns feedbacks via reflexo e geradores centrais de padrão para regular o sistema tá eu vou dar mais detalhes na sequência sobre essas características
como reflexo nos auxilia na regulação do movimento geradores centrais central de padrão e outras variáveis mais antes disso vamos tentar demonstrar para vocês o que que são essas variáveis como essas variáveis são armazenadas e alguns estudos que fundamentam a lógica da existência destes aspectos invariantes dentro do programa motor generalizado e dos aspectos vai antes eu parâmetros de controle dentro do nosso esquema motor um esquema recordação Então vamos lá a há outro aspecto importante essa lógica mais flexível abstrata do programa motor generalizado diz que no motor ela não consegue resolver Teoricamente aqueles problemas inicialmente colocados da
primeira versão proposta porque ele de programa motor então primeiro aspecto a informação abstrata ela diminui a complexidade de elementos a serem controlados Teoricamente eu não estou controlando cada detalhezinho todas as partes eu penso no aspecto demais o genérico então o diminui a demanda de controle daquilo que está sendo regulado então eu tento resolver assim esse problema chamado de complexidade como eu não vou detalhar todas as informações não são as informações dos Comandos motores que vão lá para os músculos que são estabelecidos dentro do programa motor generalizado hum Teoricamente a minha capacidade de memória ela reduz
drasticamente que agora não trabalha apenas em movimentos e ações específicas Na verdade o trabalho em classe de ações e dentro de uma classe de ação a gente pode ter infinitas variações Então resolva drasticamente a problema de memória também na sequência a informação genérica e flexível permite diferentes ações que podem ser realizadas por meio de diferentes comandos a que é o problema que nós temos da variabilidade condicionado ao contexto então lembram daquele exemplo que eu falei para vocês dependendo do grau de angulação do meu ombro eu posso estar realizando um movimento de extensão de cotovelo utilizando
tanto a musculatura agonia o Muniz tem cama de padrão de ativação Então eu preciso levar em consideração contas externas para regulação do movimento agora se eu falo aqui na verdade o que é armazenado uma informação abstrata uma ideia do padrão de movimento então eu consigo levar em consideração mesmo tempo que o ambiente ele pode ser um fator que vai influenciar isso porque ele não muda a estrutura do programa motor generalizado apenas o que muda são os esquemas motores os esquemas motores é que vão ter que se adaptar a essa condição situacional e assim eu consigo
levar em consideração também as variações do ambiente para quem tem um aspecto muito importante que em termos de demanda de controle motor alvo muito complexo também para ser considerado e permite a realização de novos movimentos qualquer ideia de aprendizagem como a gente resolve o problema de aprendizagem dentro dessa desse novo conceito de programa motor generalizada a ideia de que me anterior aqui pra eu realizar o movimento eu tinha que ter algo pré-estabelecido então Teoricamente que eu nunca o morro mas agora se é uma certa flexibilidade dentro de um próprio padrão então vamos supor que eu
esteja aprendendo o arremesso de ombro né o arremesso de uma pedrinha e eu vou praticando praticando esse arremesso posteriormente eu pego uma bola e começa a sua variar variar esse movimento e logo vou transitando daquele padrão de arremesso que lembro contra o movimento pelo lançar uma pedra mas depois tem um padrão de movimento um pouco particular para arremessar uma bola por exemplo de um de boa para fazer um ataque no handebol Então a partir de um padrão já conhecido treinado Teoricamente que não é novo eu posso criar novos padrões de movimento Ou seja eu posso
construir aprender ou desenvolver novos problemas motores generalizados nesse padrão de arremesso no handebol por exemplo eu posso posteriormente é criar um novo padrão de movimento como os aqui por cima no voleibol tá vendo lembra muito a mesma estratégia um contra-movimento que é feito para trás mas agora não vou lá e eu vou jogar a bola para cima eu vou contratar esse objeto um instante de contato então aqui são exemplos que conseguem nos auxiliar entender a forma com que é nós possamos aprender por meio dessa dessa nova proposta de programa motor generalizada e por fim eu
consigo entender também características relacionadas a assimetria de desempenho e também relacionadas a preferência lateral tão lembrem Teoricamente se você tem apenas uma estrutura Central que daria conta do controle do movimento então a gente não teria desempenhos diferentes entre os nossos mas a ideia que colocado pela Schmidt a seguinte aí a representação do padrão de movimento ela é a mesma para os dois lados então se você quer realizar um arremesso legal você vai lá e selecione esse programa motor do arremesso Agora os detalhes de como esse movimento vão ser feito isso não cabe ao programa motor
generalizado cabe ao esquema motor Então você consegue arremessar melhor alguns e do corpo na verdade que você tem mais prática o seu esquema motor dele foi mais fortalecido você deu mais vivência amassar habilidade para um dos lados então assim a gente consegue entender porque a gente tem o melhor desempenho com os lados do corpo em detrimento ao outro e até mesmo o fato da gente ter essas preferências né então a gente sabe que o desempenho Um dos fatores que pode vir a influenciar Nossas escolhas da preferência lateral então fica fácil da gente entender um pouquinho
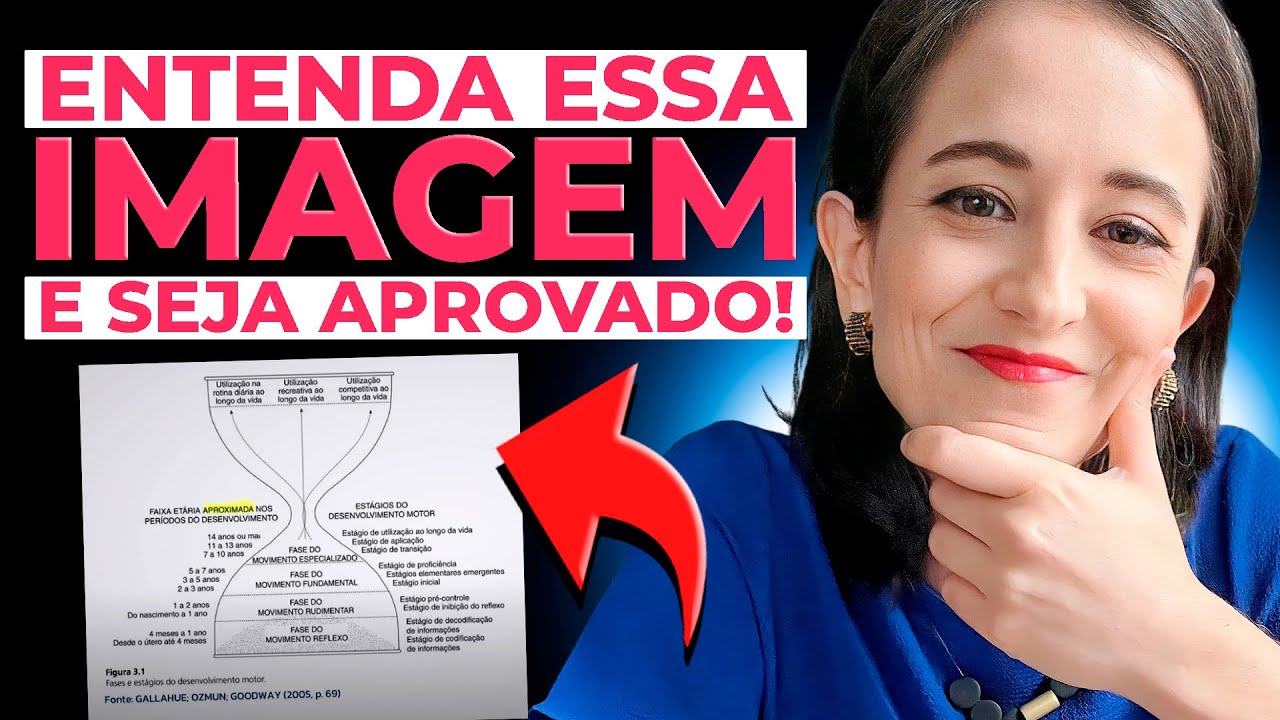
nesse processo e a gente se superar esse problema que nós encontrávamos na proposta anterior em termos de programa motor bom então vamos agora ver alguns estudos que dão subsídios para essa loja que utilização do programa motor aqui tem um trabalho que ele é bem simples bem bacana pegou uma pessoa colocou numa esteira e foi aumentando a velocidade e foi analisado o tempo relativo no qual a pessoa apresentavam diferentes fases da Marcha então coloquei ali um desenho esquemático para que você possa entender não vamos fazer uma análise CD1 mecânica complexa nesse momento pra não deixar ninguém
assustado a ideia aqui é só que vocês entendam que olha a uma fase em que eu tenho o contato do calcanhar com pedra e depois eu tenho uma fase de apoio completo e depois eu tenho uma fase em que o meu a pontinha do meu pé está sendo elevado eu tenho uma fase de balanço completo desse pé e depois eu fecho novamente esse ciclo essas fases estão expressas ali nas letras e número dois e três fip1 são diferentes fases que eu posso analisar e encontrar tanto no padrão da marcha do caminhar ou do gay fica
nome técnico para analisar e ir para o padrão de corrida agora olha que interessante que que nós vamos ali nas velocidades 3 4 5 e 6 ainda que haja uma certa variação na magnitude do tempo relativo dessas fases Teoricamente essas fases não se alteram é quase que o mesmo tempo relativo nas diferentes velocidades Ou seja a pessoa ela mantém o mesmo padrão da caminhada e essa caminhada ela não se altera lá no um pouco mais rápido mas o desenho do caminhar é o mesmo a lógica Começo porque a internet para vocês é que o tempo
relativo é uma variável armazenada dentro do programa motor generalizado então se eu vejo o mesmo padrão de movimento ainda que eu mude alguma situação por exemplo aumentar a velocidade de movimento eu não mudo o padrão de movimento entretanto se eu fizer uma mudança muito abrupta na velocidade por exemplo aumentar a velocidade de 6 km por hora para 8 km e olha o que que aconteceu com a fase Verde a fase verde foi lá para o meio a fase amarela subiu e a fase vermelha também subiu então se eu mudo os tempos relativos lembra-la dos exemplos
que eu falei da música né de você mudar os tempos relativos entre os espaços dos instrumentos historicamente se eu mudei as a ordem dos acordes lá eu mudei a música aqui da mesma forma se eu mudei Teoricamente os tempos relativos do Movimento Eu mudei movimento então ao invés de eu ter aquele padrão bonitinho agora da caminhada naquela velocidade inicial agora eu tenho um padrão na verdade que é de corrida né a gente vê Aquela fase de voo a gente veja um movimento com outro desenho Então esse trabalho de uma maneira muito simples ele consegue sempre
ficar para nós que olha quando eu tenho um padrão de movimento seu tempo relativo permanece constante dentro de uma certa variação no caso a caminhada se aumento muito mais a velocidade isso pode gerar um outro padrão de movimento no caso aqui a corrida mas mesmo dentro desses padrões de movimento eu tenho variações Então as informações Teoricamente com sua armazenadas no programa motor generalizado são essas relacionadas ao tempo relativo são todas as variáveis relativas e acordo com a proposta dos autores mas o esquema motor ele me garante essa flexibilidade eu consigo variar dentro de um mesmo
padrão por meio desses valores absolutos variáveis absolutas que nós temos que compreendem aquilo que nós chamamos de parâmetros de controle do movimento essa experimento muito simples que consegue sempre ficar bem as duas características que tornam a mente são armazenados no programa motor generalizado no arco estrutura aspectos em variantes e aquelas informações que são armazenadas dentro do esquema motor por causa que a velocidade absoluta agente está falando então dessa variação que é responsável que o esquema motor é responsável o outro exemplo tudo bem simplesinho também Olha que bacana esse aqui pediram para uma pessoa segurando uma
caneta na ponta dessa caneta tem um acelerômetro então ele média aceleração do movimento e pediram para essa pessoa escrever a palavra réu inferno em inglês pequenininho e uma grafia um pouco maior Olha que interessante eu não sei se vocês sabem mas tudo a pessoa tem um certo padrão de escrita algumas letras nós escrevamos mais rápido outra Nossa escrevemos mais lentas Então você cria uma estrutura temporal que isso é aprendido você memoriza isso um aspecto muito fácil de você verificar essa situação é na sua assinatura se você tem aquela assinatura que é uma grafia quase que
de um desenho para Teoricamente evitar com que outras pessoas corpinho aquela sua assinatura que é autêntica é somente sua você vai perceber que você tem um movimento que são feitos extremamente rápidos e outras partes mais lentas se você tentar pegar uma caneta e realizar a sua assinatura da maneira O que é como a velocidade constante você vai perceber que você vai se atrapalhar tem hora que você vai parar e não vai conseguir realizar essa tarefa tá bom então por que que socorre por quê que se você tentar deixar sua velocidade constante você não consegue realizar
sua assinatura Teoricamente quando você tem sim diferentes tempos relativos Você tem o tanto tanto tanto a sua assinatura que você entra em processos automáticos do movimento se você tentar fazer a velocidade constante você vai ter que estar lembrando Como é o desenho dessa assinatura e você passa para processos mais cognitivos do controle do movimento um outro exemplo as suas senhas normalmente quem digita a sua senha a gente chamada nenhum dois três um dois três quatro um dois um dois três alguma coisa assim você vai perceber que você tentar digitar dedo a dedo cada senha Você
às vezes vai te esquecer também com essa senha você se perde nesse comando Às vezes você nem lembra mais com ela sua senha simplesmente você tem a sua memória motora em que os movimentos que são realizados vezes são automatizados para você entrar naquela senha de e-mail que você sempre utiliza ou na sua senha de uma rede social tá então isso caracteriza algo que demonstrada aqui nesse experimento o que eles fizeram mostrar aqui olha Teoricamente a palavra réu ela é um programa motor é generalizado então a estrutura de como escrever essa palavra já está armazenado centralmente
agora eu escrevi essa palavra com uma grafia maior ou como grafia menor para isso eu preciso alterar os meus parâmetros de controle só isso é alterado é só magnitude uma variável absoluto e exatamente o que esse gráfico tá demonstrando todo esse gráfico nós temos assim o perfil da aceleração indo para frente e para trás nós percebemos que nós temos algumas diferenças em termos de magnitude de pico mas os tempos relativos em que cada mudança de aceleração para cima e para baixo acontecem ainda que a palavra seja inscrita uma grafia indiferente tamanho mas o tempo relativo
é o mesmo ou seja Teoricamente aquela informação que armazenada no programa motor generalizado é a mesma Afinal ao mesmo padrão gráfico que é apresentado então apenas as informações relativas aos parâmetros de controle se É que na verdade é o mesmo desenho é a mesma grafia da palavra réu uma ação nós temos ela em diferentes tamanhos estão quem parametrizar quem dessa amplitude de movimento é justamente o esquema motor um outro exemplo muito simples para gente mostrar a lógica do problema motor generalizado e diz que motor foi feito nesse experimento no que pela solicitaram solicitaram para uma
pessoa escrever duas palavras cognitiva e noções neurociência cognitiva mas ela escreveu ali na letra A com a mão direita na letra B com o punho direito né Segurando como se fosse o almoço e fechada escrevendo apenas com movimentos de cunho na letra C com a mão esquerda na letra de com a boca e na letra e com o pé direito Então segue a mesma lógica do slide anterior a ideia que a estrutura das palavras elas são retidas a ideia do programa motor generalizado Então tem um programa motor para essas palavras então Teoricamente eu sei como
escrever essas palavras mas eu te eu não tenho diferente da escrever na forma normal que a gente segura um lápis ou uma caneta em comparação a segurar com um e o realizar isso com outros segmentos eu consigo explicar a diferença de desempenho que nós temos por meio dos esquemas motores que Teoricamente os esquemas motores é que seriam sensíveis a essas modificações de prática Como é o treino mais eu escrevo mais com aquele padrão normal de pegada é de do lápis ou da caneta então Teoricamente nessa forma de movimento é que eu vou ter uma estética
mas interessante onde eu comparo a por exemplo lá com escrita com o pé em que nós não temos o hábito de ficar escrevendo com o pé então por isso eu consigo explicar essa variação ainda é que a estrutura das palavras são armazenadas dentro do programa autor generalizado E essas variações que eu tenho na grafia que devam dessas diferentes estéticas em termos de letra caberia ao esquema motor nos permitir Então essa variabilidade e esse experimento vem a reforçar aquilo que os anteriores colocaram para demonstrar essas características daquilo que armazenado no programa o motor generalizado e no
esquema motor o esquema recordação a ideia que eu tenho um nível superior que ele vai ser abstrato no sentido de armazenar essas informações tanto dos problemas motores generalizados quanto de esquema mas é consciência eu tô falando na maior parte das informações em nível atencional e ele é paramétrico pesar delícia abstrato ele é paramétrico consigo ter respostas precisas exatas adiante daquilo que eu quero realizar já não livro inferior de comando eu tenho que pensar numa linguagem muscular que eu tô fazendo a transcrição daquela minha intenção por uma linguagem que o músculo entendo ou seja uma linguagem
histoquímica a gente tem que lembrar que o músculo vai responder esses estímulos de impulsos nervosos são transmitidos pelos neurônios lá na sua placa motora Então essa é a ideia desse controle e aqui é um livro que inconsciente você não consegue tá regulando o processos na verdade isso tudo vai se auto-organizar depois eu vou explicar esse pouquinho à frente por meio de uma outra abordagem que trabalha melhor com esses aspectos relacionados a esse nível inferior de controle e um outro papel que é que eu vou fechar no Saulo agora e trazer para vocês e a questão
dos reflexos e geradores centrais de padrão que eles também tem uma contribuição enorme nosso sistema é muito complexo mas não é muito rico a forma com que utiliza essas informações ela auxilia e otimiza o processo de controle no movimento então reflexos a gente vai ter algumas aulas bem extensa falando sobre eles em desenvolvimento motor pessoalmente esses aqui então a gente entende que tanto os reflexos primitivos quantos posturais eles auxiliam e fazem parte no controle do movimento os primitivos pessoalmente num primeiro momento em que nós temos ainda um controle voluntário vive aquele são assim os nossos
movimentos de fábrica né o pré-estabelecidos no primeiro momento depois eles passam ser voluntários para nós temos vário eu senti vos moro choque busca suco sambuco manuais preensão Palmar a preensão plantar babinski Tonico assimétrico simétrico do pescoço alguns posturais labiríntico visuais levantamento amortecimento de apoio e o corretivo do corpo e pescoço engatinhar caminhar e reflexo do nadar todos reflexo eu vou tratar vou explicar para vocês vou falar os homens que eles aparecem e desaparecem Quando eu for comentar na aula de desenvolvimento motor vou deixar para outros vídeos em outro módulo dentro aqui da parte de comportamento
motor para esse momento eu quero apenas ilustrar trazer dizer que Olha esses reflexos também fazem parte do controle do movimento Mais especificamente eu quero falar de um reflexo que o reflexo de fuso muscular eu também vou tratar vou gravar um videozinho com uma outra aula só sobre informações sensoriais de vou resgatar esse órgão sensorial detalhar o seu funcionamento a sua estrutura mas preci momento vamos entender um aspecto básico da sua regulação tá bom hoje eu trouxe modelo bem simplesinho aqui que eu modelo biomecânico do braço e do antebraço Unidos Ali pela articulação do cotovelo Então
vamos vislumbrar a seguinte situação tá nós temos ali uma musculatura agonista Teoricamente nos flexores e temos que está aqui é o meu representado numa muscular direita que tem o desenho preto de um fuso muscular dentro e a esquerda nós temos a minha musculatura antagonista que está representado ali que ser meu tríceps que é responsável pela extensão de cotovelo e nós temos um neurônio ali eferente que sai lá da medula e faz sua musculatura do meu vice descontrair unido temos também um neurônio eferente que eu faço musculatura do tríceps também contrair com treino relaxar né se
eu deixo encontrar eu estou relaxando e eu tenho outro neurônio aferente que ele sai lá do meu fuso muscular na musculatura do bíceps e vai também até mesmo dor Então vamos supor que eu estou com meu cotovelo infletido 90 graus e de repente vem uma carga que empurra esse mim em baixo o que que acontece quando empurra esse Meu cotovelo para baixo até unicamente Eu Vou estender vou despender a minha musculatura do bíceps então ele aumenta de comprimento quando ele aumenta de comprimento Esse é justamente o estímulo para atuação para ativar o meu fuso muscular
como resposta o fuso mano o comando para medula e esse comando volta falando para musculatura contrair a gente brinca que o fuso muscular ele é um defensor do nosso músculo ele tem a função de falar o seguinte Olha a nossa musculatura ela está esse tirando ele está estiando se ela continuar assistir ela vai romper entrar lá manda o comando para medula para que a medula faz quanto músculo novamente com finance Ah tá mas ao mesmo tempo que isso acontece nós temos um outro circuito que é colocado ali para inibir a ação que nós temos o
tríceps porque Teoricamente é seu em cortar musculatura do bíceps automaticamente e o aluno a musculatura do tecido isso poderia é o fuso muscular do tríceps também fosse ativado na sequência mandarem um comando de contração para o tríceps e a gente teria não é basicamente um espasmo muscular no meu sistema Ele ficaria assim tá isso é chamado de co-contração Existem algumas patologias em que essa circuitaria de reflexo de injeção recíproca ele tem uma certa deficiência isso pode ser verificado mas não é o caso agora nós vamos entrar em aspectos patológicos por esse momento vamos trabalhar com
os movimento típico então aqui eu quero apenas exemplifi Car a forma de ação do fuso muscular Então você tem anime estiramento do músculo esse estiramento faça um criativo fuso fuzo monocomando para medula que automaticamente faz com que essa musculatura agonista que se estirou ela com praia e automaticamente vai um outro comando para musculatura antagonista que vai relaxar Então você tem aquele movimento que nem diretamente percebida percebido só depois quando o movimento realizado por pensando muito rápido depois vou mostrar para vocês e é G é porque eu tô fazendo essa informação porque os fusos eles têm
um papel muito importante na regulação do movimento a gente vai ter vários movimentos em que a gente fecha aquele circuito menor de feedback em que o movimento vai se corrigindo assim que a gente precisa passar por níveis superiores atencionais para regulação do movimento Tá além do fuso entre uma outra estrutura muito importante que são os geradores centrais de padrão gecps que que é isso tem chama atenção para o GC peso é um cara também que eu sou fã de carteirinha que o Eric kandel os maiores neurocientista se no mundo sabe tem dois livros princípios e
fundamentos em neurociências São do tamanho de uma Bíblia gigantescos um compilado de trabalho muito legal tá vale a pena conhecer e Candela ele nos mostra a importância que nós temos dos geradores centrais de padrão mas eu trouxe um outro experimento aqui que neném do candel tá olha que fizeram com esse gatinho para exemplificar a existência dos geradores centrais de padrão não pegaram o gatinho eu falo esse gatinho em diferentes partes do seu corpo em uma esteira para que ele não pudesse sair e daí realizaram recentemente aquele procedimento que eu comentei para vocês no início da
aula anterior que a desaferentação estrutural ou seja chegar ali próximo à região cervical desse gatinho e recepcionaram as vias aferentes de cigarro então da secção para baixo aquele gato Não sentiu mais nada foram seccionadas apenas as vias aferentes as vias sensoriais então não tinha feedback não tinha sensação sobre nada do que acontecia abaixo mas a circuitaria motora dele estava intacta diferente por exemplo de um lesado medular não é um ser humano que às vezes sofre alguma lesão mais grave na medula e às vezes tem rompimento Total tanto das vezes referência e contra-referência ele não sente
mais nada e não consegue movimentar mais nada da lesão Para baixo a situações de lesões parciais que eu vou rupturas e por exemplo solda aspecto prefeituras e só do aspecto referente uma diferentes graus de lesão aqui nesse caso foi uma desaferentação estrutural Total apenas da feirenses no solo só da frente se há aspectos motores estão todos empregos e não Bastando tudo isso que fizeram com o gatinho eles ainda ligaram a esteira e aí que que você acha que aconteceu quando ligaram a esteira e esse gatinho estava lá nessas condições bom você espera foi ligado automaticamente
a patinha desse gatinho foi indo pra trás se deve imaginar que ela ficou só arrastando né espera arrastando esse gatinho no início sim a patinha levada para trás mas quando essa patinha vai para trás o que que acontece outra fuso muscular de alguns grupos musculares de repente esse gatinho começa a apresentar o padrão da Marcha ele começa a caminhar por sobre a esteira sem ele querer sem ele saber isso tudo é controlado por uma cadeia de reflexos difuso que são basicamente os nossos a Dori centrais padrão o que que é o gerador central de padrão
Teoricamente são cadeias de reflexo um pouquinho mais elaborados um pouquinho mais complexas que elas são específicas a espécie e normalmente elas são atrelados a tarefa de locomoção tá então tem vários estudos mostrando GC PS1 diferentes animais mamíferos répteis e eles associam normalmente a esse movimento que nós temos locomoção Tá mas qual a importância desses dias e fez o quê que eles podem agregar e trazer para nós enquanto isso acontece em seres humanos Vamos tentar entender então tem uma outra pesquisadora muito importante na área de comportamento motor que a hester prynne era considerada a mais importante
dentre as pesquisadores áreas movimento motor a Ester fez tem alguns experimentos clássicos Esse é um deles ela pegou um bebezinho e ela estimulou o reflexo da Marcha então depois eu vou mostrar para vocês como fazer isso quando eu só aparece Mas você e tirar um bebezinho sustentar a parte do seu corpo em tem mais se Corpo à frente e você for baixando esse bebêzinho ele começa a caminhar e apresentar aquele padrão como se fosse de uma caminhada então o que que é Ester fez isso é um reflexo que é normal a gente consegue observar em
várias situações situações do cotidiano mas a Ester foi um pouquinho além ela pegou esses bebêzinhos esse grupo de bebês colocou uma esteira com uma velocidade para um dos pés e colocou outra esteira com outra velocidade para o outro pé e ela simplesmente ligou as esteira então o que que aconteceu a gente acabou de conhecer a estrutura do gcp geradores centrais de padrão a gente observou que as crianças começavam a caminhar com diferentes velocidades para cada pé isso nos mostra uma característica que ela é muito interessante tá que mostra na verdade a flexibilidade que nós temos
dentro dos geradores centrais de padrão tão trabalho muito interessante é para quem tem um e com seres humanos e diferente do estudo anterior que eu mostrei com animais Não precisa desaferentação eu preciso de nenhum processo invasivo nem nada tá é uma externa os três uma maneira muito brilhante e muito interessante É ué é e qual a implicação qsg CPS tem para nós bom a ideia dos geradores centrais de padrão é que para alguns movimentos esses locomotores Nós não precisamos utilizar por exemplo toda a nossa demanda atencional eu consigo iniciar o movimento por meio de um
controle voluntário mas posteriormente a regulação desse movimento por exemplo caminhar correr ele é direcionado para níveis inferiores Então olha que bacana o nosso Centro de Controle Na verdade o nosso sistema ele consegue fazer o uso de todas as suas características a gente tem proveito também desses reflexos além dos problemas motores os esquemas motores mas nós conseguimos também utilizar esses reflexos esses geradores centrais de padrão para a regulação do movimento eles também são estruturas importantes que nós levamos em consideração é um outro exemplo que nós temos para mostrar a questão do reflexo aqui é um reflexo
difuso é esse experimento feito aqui em que nós temos uma pessoa sobre uma plataforma e essa plataforma num primeiro momento da sempre ficava ali na tarefa ela faz um movimento de translação ela desliza para trás automaticamente a pessoa tende a realizar esse movimento de projeção no seu corpo à frente aquela faz uma plantiflexão e analisado Justamente a musculatura do nosso tríceps sural nosso gastrocnêmio são colocados alguns eletrodos ali muito parecido com aquela tarefa que eu expliquei no extensão de cotovelo né É o mesmo sistema de análise eletromiografia em outra situação a pessoa está parado também
nessa plataforma só que agora ao invés de movimento de translação nós temos um movimento de rotação a pessoa ela faz movimento de voltar sem mais uma vez a plantiflexão ela é observado e o que que esse experimento mostra essas perturbações elas ocorrem no momento em que quem sabe ela pega de surpresa e percebe-se um perfil de ativação muscular ou seja musculatura já contrai para tentar corrigir essa perturbação ou seja evitar com que a pessoa caia uma magnitude de 100 milisegundos 100 milisegundos é algo muito rápido para vocês terem uma ideia um tempo de reação assim
absurdo de uma pessoa um tempo de reação simples seria mais ou menos a magnitude de 160 mil segundos são pessoal apresentar algo abaixa disso realmente a gente fala que a pessoa ela está antecipando não tempo de reação real a gente tende a responder algo em torno de 160 180 meses segundos então quando a gente fala numa ordem de 100 milisegundos a gente tá falando daquele circuito de feedback que acontece num nível medular na verdade a musculatura esse tirou fuso foi ativado ou comando vai para medula EA medula manda esse o comando para musculatura contrair então
reparem que antes de você perceber que o seu sistema está perturbado e você decide aquilo que tem que ser feito para o movimento o seu sistema já consegue se auto-organizar no sentido de proporcionar uma resposta inicial para tentar ajustar a perturbação que dada isso não acontece só no nosso ação tão abrupta conto essa experimentalmente mostrada é verdade quando nós estamos andando por exemplo no local em que nós temos um terreno muito irregular você vai pisando nessas diferentes superfícies e você na verdade vai ajustando a sua pisada conforme a demanda conforme Na verdade o terreno esses
cursos vão sendo ativos vezes você nem percebe que esse terreno está tão irregular assim porque esse controle passa ser delegado para níveis inferiores os reflexos vão atuando ali também e você às vezes Está simplesmente direcionando sua atenção para conversar com uma pessoa pensar Onde você tá indo e por aí vai tá então não sistema ele é muito inteligente nesse sentido é uma característica muito bacana que nós temos nós estamos chegando ao fim então vamos tentar juntar as peças para responder A grande questão como nós compramos o movimento humano a ideia que o meu sistema sensorial
abre alimento meu sistema então eu consigo tomar minha decisão pensar naquilo que eu quero realizar e se estabelecer meu ação que eu quero realizar escolher o meu padrão de movimento o início então eu primeiro Receba essa informação sensorial no nível pré-convencional aí no nível atencional eu vou tomando a minha decisão para pensar naquilo que eu quero realizar em função do teu quero realizar se eu quero correr sal papo a eu vou selecionar o meu programa motor que acontece daí nesse estágio de programação ambos os níveis percepção e programação ocorre no nível atencional devo escolher meu
programa motor parametrize meu programa motor por meio diz que no motor o esquema de recordação isso daí é enviado por nível de coordenação e que é transcrita essa minha intenção para uma linguagem que a musculatura possa entender na sequência eu mando esses comandos para que o músculo realização concomitante mente eu vou fechando o circuito circuito maior que passa por um nível tem sinal de novo de feedback e o circuito menor de feedback que eu voltei dessas correções via reflexo então aqui no nosso basicamente conseguimos responder explicando as diferentes etapas de como nós controlarmos o e
as controlámos o movimento humano por meio de programas motores generalizados e sistemas motores associado ao controle e ao uso dos feedbacks sensoriais tá bom essa foi a nossa aula de processamento de informação nós fizemos a primeira parte aqui nós estudamos até a primeira proposta e as limitações da primeira proposta do programa autor apresentado por quilo e na sequência vêm Schmidt com uma nova concepção programa motor generalizado nos entendemos como essa nova proposta consegue resolver os 5 problemas apontados na no conceito anterior de problema motor e posteriormente nós temos subsídios para essa abordagem por meio de
algumas alguns experimentos que mostram as variáveis que são armazenadas dentro do programa motor generalizada e dentro do esquema então nós iremos as características de um processamento hierárquico a ideia que nós temos um processador central que armazena toma as decisões e delega aquilo que é feito e alguém que é subordinado que o nosso sistema excretor tá então por isso que nós falamos um controle hierárquico trabalhamos com uma lógica de memória centralizada as informações são armazenadas ali no nosso corpo é esse motor ali Teoricamente estão alocados os problemas motores generalizar E aí nós trabalhamos com os conceitos
principais de problemas motores e porque o motor generalizado e os esquemas motores ou esquemas recordação programa motor generalizada ele é responsável pela macroestrutura ideia ou a classe de movimento EA microestrutura ela ocorre em função dos nossos esquemas motores ou esquemas motores de recordação dentro dessa macroestrutura o programa motor generalizado nós temos aquilo que é chamado de aspectos ou características em variantes que são as variáveis relativas de sequenciamento e dentro do nosso esquema motor que caracteriza o nosso amigo estrutura nós temos os parâmetros de controle ou também chamado do aspectos absolutos aspectos variados Já o nosso
sistema é eu mostrei pra vocês também que esse sistema de trabalho de uma maneira mais Uniara em termos de processamento aquele fluxograma do slide anterior ele exemplifica bem isso a informação ela vai cruzando o passando de maneira linear nas diferentes fases e estágios internacionais Ah tá e com essa foi a nossa aula de processamento de informação na verdade as nossas duas aulas eu espero que você é o final dessas duas aulas tenha conseguido entender e responder Aquela nossa pergunta inicial de como nós encontramos o movimento humano Espero que de alguma forma esse material possa ter
contribuído para sua formação em comportamento motor nós ficamos por aqui que Deus te abençoe e até o próximo vídeo