E aí galera foi bonita a aula de equações né então agora vamos passar direto pra di álgebra segura aí o professor Fábio E aí pessoal do me salva Vamos começar agora então nossa revisão de toda a álgebra linear álgebra é uma matéria que às vezes é considerada difícil não porque as contas são complicadas a gente não tem que fazer nenhuma integral nada bizarro assim mas porque ela tem muito conceito ela é bastante abstrata mas a mesmo tempo ela tem muitas aplicações tem uma matéria muito importante PR gente aprender o a ára linear ela começa com
o problema de resolver sistemas lineares então sistemas lineares são aqueles que as equações São escritas com as nossas incógnitas multiplicadas por algum número só não tem número ao quadrado não tem eles multiplicados por eles mesmos e o procedimento que a gente faz para resolver um sistema linear é tipo que se faz no ensino médio é pegar as linhas somar elas umas nas outras de forma a gente tentar obter equações que dependam só de uma variável e não dessas três por exemplo e a maneira que a gente pass é o seguinte nós primeiro escrevemos uma matriz
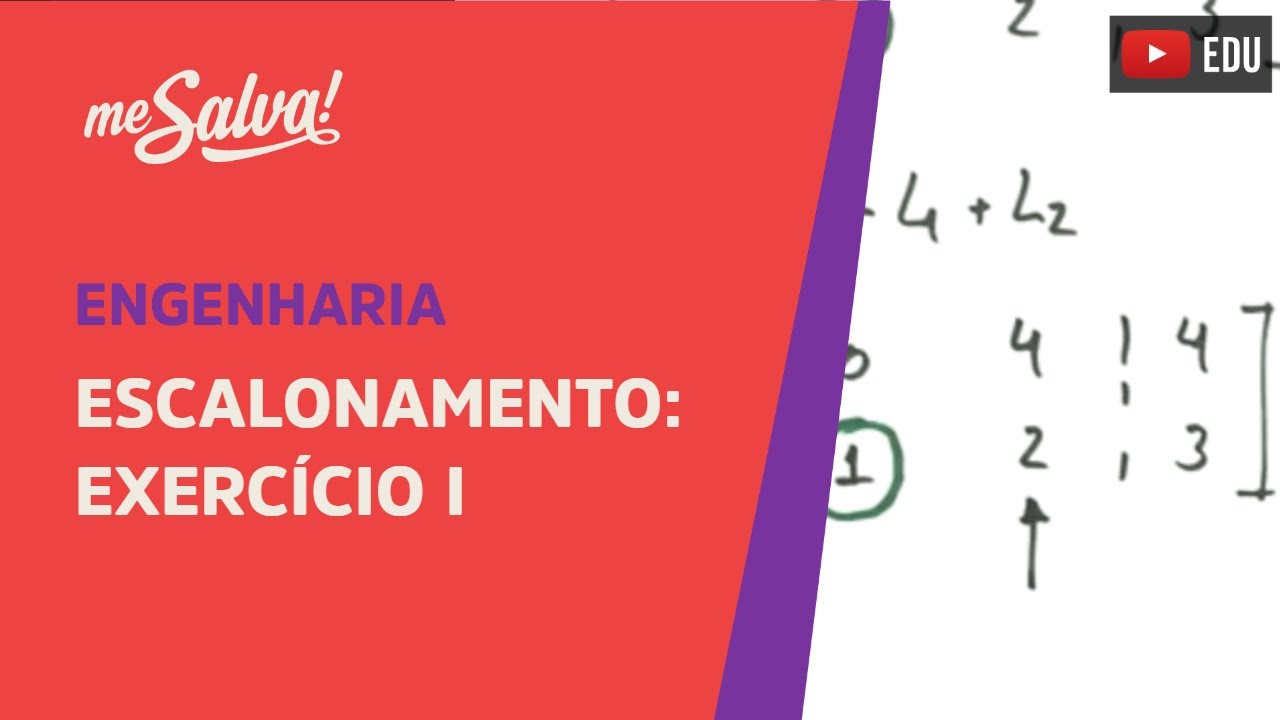
uma tabela um aglomerado de números de uma forma organizada com os coeficientes dessas equações então o número que multiplica X1 aqui ú dis ainda não tenho dúvid res e essa Matriz aqui essa tabela de númer d a mesma informação uma forma diente mão ass m essin operações vão ser as mesmas entre as linhas da Matriz por exemplo se eu quiser eliminar esse Men 2 X1 aqui dessa linha aqui dessa equação 2 eu preciso somar duas vezes a primeira equação nela Então eu pego e somo duas vezes a primeira linha dessa Matriz aqui na segunda e
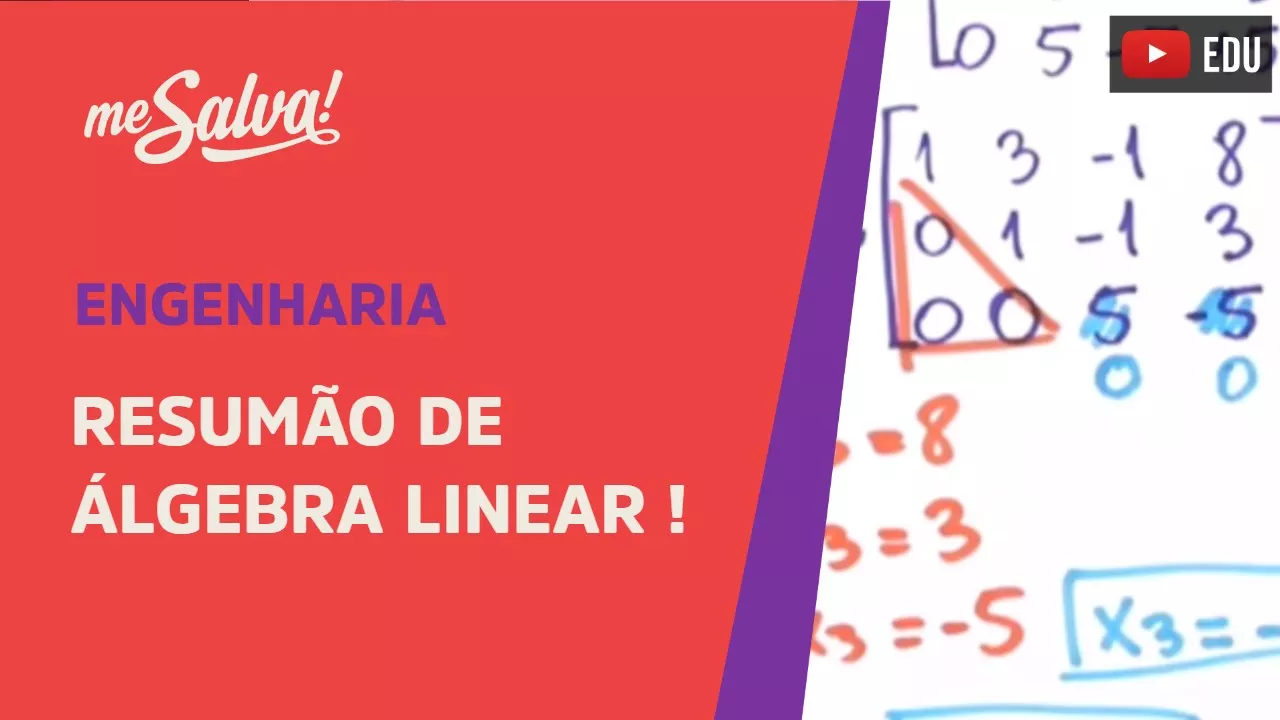
fico com a primeira linha continua igual 1 3 - 1 8 e a segunda eu somo duas vezes a primeira na segunda então 2 - 2 0 2 x 3 6 + 0 6 2 x -1 - 2 + 1 - 1 2 x 8 16 - 3 13 e aqui a gente pode fazer para eliminar esse valor aqui da terceira linha somar a primeira com a última então a gente fica com 1 - 1 0 3 + 2 5 - 1 - 4 - 5 e 8 + 7 15 certo aqui a gente tem
uma nova tabela de números que nos dá uma informação Desse nosso sistema de equações essa tabela aqui é como se fosse esse mesmo sistema que a gente manipulou para chegar mais perto da solução então se a gente quiser continuar fazendo essa conta aqui que que a gente pode fazer essa primeira equação aqui a gente deixa igual 1 3 - 1 8 essa nossa última equação aqui a gente pode dividir toda ela por 5 e ficar com 0 1 - 1 e TRS certo a ordem tanto faz a gente pode deixar a segunda no lugar da
terceira tanto faz e agora a última a gente tem esse seis aqui que a gente quer eliminar vamos deixar ele aqui e continuar a conta - 1 e 13 certo simplifiquei essa equação mudei a ordem e agora se a gente continuar fazendo a conta a gente pode multiplicar a segunda linha por -6 e somar na última que identifica com 1 3 - 1 e 8 0 1 - 1 e 3 e agora se a gente multiplicar essa linha por -6 e somar na terceira 0 com 0 continua 0 - 6 x 1 + 6 dá
0 - 6 x -1 dá 6 - 1 dá 5 -6 x 3 dá -18 + 13 dá -5 e daí agora essa tabela aqui escalonada que a gente chama quando fica uma escada aqui de zeros ela nos representa o sistema fácil de resolver Porque as equações que estão descritas aqui são X1 + 3 X2 - X3 = 8 X2 - X3 = 3 e por último aqui 5 X3 = -5 certo agora a gente pode resolver isso aqui fazendo simplesmente a gente sabe que X3 tem que ser igual a -1 dessa equação aqui e
e sabendo que X3 é -1 a gente substitui na segunda então nós vamos ter X2 - -1 + 1 = 3 e portanto X2 = 2 e por último se a gente substituir nessa primeira equação os dois valores que a gente já calculou nós vamos ter X1 + 3 X2 ou seja + 6 - X3 ou seja + 1 = 8 e portanto X1 é ig a a 8 - 7 1 certo basicamente todos os problemas de álgebra linear que a gente tiver vão se resumir a um sistema que a gente precisa escalonar e daí
a gente faz esse procedimento para encontrar soluções pode acontecer do nosso sistema não ter solução por exemplo se aqui em vez de 5 a gente tivesse zero a nossa equação seria 0 = -5 e da o sistema não tem solução ou poderia acontecer ainda desses dois valores serem zero quando a gente terminou de escalonar e daí a gente teria duas equações e depois nenhuma a gente tem 0 igual a zero e daí a gente teria infinitas soluções certo então esse procedimento de escalonar além de nos dizer se o sistema tem solução e quantas soluções eles
têm a gente permite obter qual Exatamente é essa solução certo bom a ideia da álgebra linear é enxergar esse tipo de problema em diversas situações então primeira coisa que se faz em geral é quando a gente olha um sistema assim a gente pensa ele em três partes separadas que são seguinte uma tabela com os co que nem o que a gente fez antes que são os coeficientes que multiplicam os X1 X2 X3 que é a matriz dos coeficientes aqui uma lista das nossas incógnitas e do lado direito do igual a gente tem os números que
ficaram lá o lado direito certo esses elementos aqui são que a gente chama de vetores que agora no começo para nós um vetor é uma lista de elementos certo e aqui essa é Nossa matri então a gente energa um sistema de equações naade como uma equação em que a nossa incógnita é esse vetor aqui E esse vetor é uma lista de elementos no momento que a gente descobriu quem é esse vetor a gente descobriu quem é o X1 quem é o X2 e quem é o X3 e portanto a gente tem então a nossa solução
essa ideia de representar com matriz e vetores então nos permitem escrever o sistema como uma equação só e a nossa incógnita esses vetores o número de coordenadas que ele tem nos dá o espaço com que a gente tá trabalhando por exemplo aqui nós estamos trabalhando com três incógnitas com vetores aqui de três elementos a gente chama esses caras de R3 vetores de três números reais certo e daí agora a gente vai começar a manipular esses vetores em vez de manipular aqueles sistemas de equações e as operações que a gente faz com vetores são bastante simples
que são somar eles e multiplicar eles por números a soma de vetores é simplesmente se a gente tem um vetor aqui A1 A2 e a gente soma com um vetor B1 B2 o resultado dessa soma é simples A1 + B1 e a outra coordenada A2 + B2 certo somar vetores é a mesma coisa que somar as componentes deles e multiplicar um vetor por um escalar se a gente tem uma constante k e a gente pega esse número e multiplica por um vetor qualquer por exemplo a 1 a 2 o próximo Fala galera tivemos problema técnico
aqui a luz C enfim é Brasil e a gente não teve o que fazer então voltando agora no Professor Fábio e álgebra linear boa aula galera quer a norma desse vetor é o tamanho dele isso vem das nossas ideias de geometria analítica mesmo se a gente tem um vetor aqui a norma dele o tamanho dele vai ser a raiz da soma das coordenadas dele ao quadrado por exemplo se fosse um vetor no R3 a norma dele seria a raiz de v1 qu + V2 qu + V3 qu é o tamanho dele e o produto interno
entre dois vetores é uma operação entre dois vetores então que a gente denota assim o escalar v o Ponto V chamado de produto escalar também e isso aqui nos dá a norma do U vezes a norma do V vezes o ângulo entre eles cosseno do ângulo entre eles essa é uma operação aqui que faz sentido quando a gente pensa em ângulos quando a gente tá em duas ou em três dimensões Mas se a gente faz essa conta em duas ou em três dimensões a gente obté que o resultado disso aqui é o produto dos das
coordenadas dos vetores de um a 1 que que eu quero dizer com isso a gente pega a primeira coordenada do 1 multiplica com a primeira do V depois soma com a segunda coordenada do U multiplicada pela segunda coordenada do V e depois a terceira coordenada do U multiplicado pela terceira coordenada do V essa operação aqui de pegar cada coordenada multiplicar entre si e depois somar todas pode ser feita com qualquer vetor em qualquer dimensão então isso aqui é o que a gente define como produto interno de dois vetores e daí pensa o seguinte se a
gente tem dois vetores diferentes de zero o tamanho deles é diferente de zero também se por acaso o produto interno aqui der zero significa que esse cosseno do ângulo aqui tem que ser zero certo se esse número não é zero esse número não é zero mas a multiplicação dos três deu zero só pode ser que esse terceiro número aqui tem que ser zero e portanto se esse cara é zero significa que o ângulo dos vetores é de 90º isso faz sentido quando a gente pensa em duas ou três dimensões Mas a gente pode generalizar e
definir que dois vetores são ortogonais e daí a gente escreve assim u é ortogonal é perpendicular no caso ao V é a mesma coisa que dizer que o escalar v o produto interno com v é igual a zero certo e e essa definição de ortogonalidade é bastante importante porque a partir dela a gente pode pensar em bases ortogonais Como assim lembra que uma base é um um conjunto de vetores linearmente Independentes que a gente pode usar para descrever ã um espaço vetorial por exemplo se a gente tiver esse vetor aqui v1 e esse vetor aqui
V2 eles são vetores ortogonais e eles são uma base pro nosso R2 a gente pode escrever qualquer vetor do R2 com uma combinação linear deles se a gente quiser saber como que a gente pode escrever como uma combinação linear pensa que a gente tem um vetor x qualquer aqui e a gente quer escrever ele como algum múltiplo do v1 mais algum múltiplo do V2 bom geometricamente faz sentido a gente enxergar isso da seguinte forma último assunto que a gente tem para tratar mais esse certo como se fosse a sombra do nosso vetor x aqui em
cada um dos eixos isso faz sentido porque justamente esses dois vetores são ortogonais e essa operação da sombra é o que a gente chama de uma projeção então a projeção de um vetor em outro é calcular a componente dele nessa direção Então imagina que a gente tem aqui um vetor u qualquer e a gente tem um vetor x a projeção de X em cima desse vetor u é esse vetor aqui paralelo ao u tá tal que ele é exatamente a sombra do X se a gente completar esse vetor com o que falta esse vetor que
falta aqui vai ser ortogonal ao u certo para calcular se a gente fizer essa conta a gente vai ver que a projeção do x sobre o u pode ser calculada por x escalar u dividido por U escalar u vezes o vetor u então isso aqui é um número dividido por outro número então é alguma constante vezes o u essa projeção do x em cima do u é algum vetor que tá na mesma direção que o u e essa constante aqui nos diz exatamente qual é o tamanho dele certo isso aqui então é o que a
gente chama de uma projeção ortogonal em cima de um vetor Mas a gente pode ser mais geral e falar da projeção ortogonal em cima de um espaço qualquer por exemplo Digamos que a gente tem aqui um espaço vetorial w que a gente tem geometricamente represent aqui como Umo facilitar a gente visualiz o que tá acontecendo e nesse espaço vetorial w aqui eu tenho uma base ortogonal o v certo daí se eu tiver um vetor qualquer aqui x eu posso querer fazer Qual é projeção ortogonal dele qual é sombra emima desse espaço vetorial Ema desse w
então é um vetor aqui a projeção vou chamar de chapéu a projeção do X no espaço vetorial w é um vetor que pertence ao w e que o vetor que falta para completar com X é perpendicular a esse espaço vetorial é ortogonal a esse espaço e daí para calcular Quem é esse cara no momento que a gente tem uma base ortogonal tudo que a gente precisa fazer é a projeção do x em cima do u somada com a projeção do x em cima do V certo is tudo são ideias geométricas que tem uma aplicação muito
útil às vezes fora da geometria a principal aplicação em termos de engenharia disso aqui é por exemplo o conceito de mínimos quadráticos problemas de mínimos quadráticos são problemas que surgem em várias e várias áreas da ciência que são mais ou menos o seguinte no contexto aqui a gente faz um experimento por exemplo que a gente quer saber como que um corpo dilata quando a gente esquenta ele então a gente mede o comprimento desse corpo várias vezes seguidas para diferentes temperaturas e a gente botou aqui num gráfico o comprimento em função de temperatura percebe que parece
que existe uma reta que descreve bem esse comportamento mas como minhas medições não são perfeitas esses pontos estão dispersos aqui um pouco em torno dessa reta se a gente quisesse achar uma reta exatamente que passa em todos esses pontos a gente precisaria fazer achar alguma função y = Beta 1x + beta2 Ou seja a equação de uma reta aqui que quando a gente faz isso me dê eh D certo que essa equação bata para todos os pontos então para cada ponto aqui que a gente tem Digamos que a gente tenha 20 pontos nós vamos ter
20 equações a equação que tem que bater pras coordenadas do ponto 1 pras coordenadas do ponto 2 e assim por diante certo a gente teria que ter até o Y2 que cada um dos y é igual a Beta 1x + beta2 esse aqui por exemplo seria um sistema de 20 equações com só duas incógnitas ele não vai ter solução não existe uma reta que passa por todas esses pontos mas a gente gostaria de saber de qual é a melhor solução Qual é a reta que melhor descreve esse comportamento Então imagina o seguinte essa Matriz aqui
desse sistema seria uma matriz grande aqui teria um sistema essa Matriz aqui vezes o meu vetor Beta igual a minha lista aqui dos y certo essa Matriz ela teria 20 linhas e duas colunas Então ela pega um vetor do R2 aqui e me dá um vetor do r20 certo ela pega um vetor de duas coordenadas no caso aqui que é o Beta e me dá um vetor de 20 coordenadas só que o vetor que a gente gostaria de obter não pertence à imagem dessa minha aplicação por essa matriz A aqui certo enxergando isso como a
transformação linear eu tenho uma transformação linear aqui que a partir desse vetor vai me gerar um outro aqui só que o conjunto de todos os vetores que podem ser gerados estão nesse espaço bidimensional dentro do r20 e eu gostaria de gerar esse vetor B aqui eu não consigo gerar esse Mas eu posso descobrir quem é o vetor que pertence à imagem dessa transformação ou seja qual é o o Beta que eu posso obter que me leva mais próximo desse B aqui e geometricamente essa ideia mais próxima é a projeção ortogonal certo então em vez de
obter o b eu vou tentar obter o mais próximo do B que eu consigo que é a projeção ortogonal do B sobre esse subespaço aqui fazendo as contas disso a gente vê que o sistema que a gente queria resolver que era a Beta iG Y não tinha solução Mas a gente pode resolver o sistema a transposta a Beta igual a a transposta y esse sistema aqui agora vai ser um sisteminha 2x 2 e a resposta dele vai ser o vetor Beta eu vou chamar de Beta chapeuzinho que me dá as os coeficientes da melhor reta
possível então quando um sistema não tem solução a gente pode procurar A melhor solução possível e essa melhor solução vem dessa ideia de projeção ortogonal e ela pode ser obtida resolvendo esse sistema aqui a gente multiplica dos dois lados pela transposta da matriz e resolve esse sistema menor Então essa aqui é a ideia do mínimos quadrados esse B aqui vai ser a nossa solução de mínimos quadráticos o último tópico que a gente tem para discutir finalmente é conceito de autovalores e aut vetores e isso aqui tem infinidade de aplicações A ideia é o seguinte nós
procuramos quando a gente fala de autovalores e autovetores para uma matriz a qualquer Então a gente tem uma matriz a e a gente quer saber se existe algum vetor se existe algum vetor V tal último assunto que a gente tem para tratar ainda Debra linear é o que a gente conhece por autovalores e autovetores Então imagina que a gente tem uma matriz A e um vetor V aqui esse vetor v a gente chama de um alto valor um al vetor aliás da Matriz a se quando a gente essa multiplicação a por v a gente obtém
simplesmente lambda x v algum número esse lambda aqui é um escalar número vezes o vetor V Então a gente tem um vetor aqui V diferente zero a gente aplica essa multiplicação de matrizes mas o vetor V enxerga como resultado simplesmente a multiplicação por um número saber os autovetores de uma matriz permite que a gente resolva o problema de maneira mais fácil porque é muito mais simples a gente multiplicar por um número do que mcar para uma matriz certo Então nesse caso aqui em que a gente tem ã que isso aqui acontece a gente diz que
V é um al vetor e que o nosso lambda é o alto valor associado a esse alto vetor então por exemplo se o lambda for 3 eu sei que se eu multiplicar a por V eu vou obter 3v certo V é um alto vetor lambda é o alto valor Ass AD a ele e daí como que a gente pode descobrir quais são os autovalores os autovetores de uma matriz pelo polinômio característico Como assim a gente sabe que a gente precisa Então para que seja um v um a vetor que a seja igual a algum amb
x v certo isso é a mesma coisa que dizer que amb V - A V é igual a z0 ou ainda que LAMB ve a identidade vezes V menos a v é igual a 0 eu escrevi amb ve identidade por dois motivos um multiplicar pela identidade não muda nada certo isso Me permite escrever uma matriz vezes V menos outra Matriz vezes V ou seja essa equação aqui pode escrita como a matriz LAMB i - a X V = 0 percebe que V por definição tem que ser um vetor diferente de zero então V = 0
sempre faria com que isso fosse verdade agora se V é diferente de zer e essa equação É verdade significa que essa equação aqui ela possui então mais de uma solução se ela possui mais de uma solução ela obviamente possui infinitas soluções certo nossos sistemas possuem Ou uma ou nenhuma ou infinitas Soluções bom como que a gente pode descobrir se essa Matriz aqui possui infinitas soluções ou para quais valores de lambda ela possui infinitas soluções calculando o determinante certo se ela possui infinitas soluções quer dizer que a solução não é única e portanto a matriz ela
não é invertível Ou seja o determinante de amb i - a tem que ser igual a z0 essa aqui é a nossa equação chave para trabalhar com alto valores e al vetores percebe que o determinante vai ser uma expressão que depende desse Lda aqui e essa expressão é um polinômio vai ser um polinômio que depende do Lda que a gente chama do polinômio característico da Matriz a as raízes desse polinômio certo a vai ter uma equação da forma polinômio igual a zer vão ser os alores da Matriz por exemplo se eu tiver uma matriz aqui
2 3 3 - 6 e eu quiser calcular o nomeo característico eu vou fazer o determinante então de amb i - a isso aqui vai ser lembra que amb I amb I vai ser a matriz amb 0 0 L certo amb xz identidade Então essa matriz - A vai ser amb - 2 - 3 - 3 amb + 6 e o determinante é esse produto menos esse então é amb - 2 + 6 Men esse produto aqui que é 9 então nós temos o nosso polinômio característico sendo L qu -2 + 6 4 - 12
-9 então - 21 = 0 se a gente quiser descobrir quais são os valores a gente faz basc produto soma a gente tem dois números que multiplicados dão -21 que somados dão então esses números são -7 e 3 certo então os dois autovalores dessa matriz São -7 e 3 e quais vão ser os autovetores associados bom se eu substituir lambda igual a 3 por exemplo eu vou ter aqui substituo por exemplo lâ iG 3 e vou obter uma matriz que vezes V tem que dar zer essa Matriz aqui que eu obt eu vou saber com
certeza que ela não é invertível que ela possui infinitas soluções e daí essas infinitas soluções vão me dar quem é o autovetor v por exemplo se eu fizesse essa conta agora para LAMB iG 3 ó calculasse essa Matriz aqui pro caso do LAMB C3 a matriz seria 3 - 2 1 aqui - 3 Men 3 e 3 + 6 9 certo então eu tenho que imaginar que eu tenho essa Matriz aqui ve V = 0 e os aut vetores então Associados a esse aut valor amb = 3 vão ser aqueles números aqueles vetores V pros
quais essa equação aqui é verdade todos os vetores diferentes de zero pros quais essa Matriz vezes V vai dar zero certo então assim eu primeiro calculo os autovalores sabendo eles eu posso descobrir quem é o aut vetor associado a cada um deles uma outra maneira de enxergar isso é pelo processo de diagonalização qual é a ideia Digamos que eu tenha aqui um vetor x e esse meu vetor x possa ser escrito como uma combinação linear de autovetores da matriz A então o X é por exemplo C1 v1 + C2 V2 em que v1 e V2
são autovetores daí eu sei que a x x vai ser a vezes isso aqui ou seja C1 L 1 v1 + c2 2 V2 certo nessa nesse sistema de coordenadas da base constituída pelos autovetores a minha operação a minha transformação linear consiste simplesmente em multiplicar cada uma dessas minhas coordenadas por um valor ã constante certo então essa transformação linear aqui ela é mais fácil Se eu representar o meu sistema na base dos autovetores essa esse processo aqui de representar o sistema na base dos autovetores fazer a operação linear aqui a transformação linear nessa base ou
seja multiplicar pelos lambdas e em seguida voltar pra base que eu tinha é o que a gente chama de compor a matriz em uma fatoração que é diagonalizada Como assim se eu fizer uma matriz que a gente chama em geral de p que cada coluna é um a vetor e eu fizer uma matriz D em que eu tenho os alov valores na diagonal e zero no resto eu posso escrever a minha Matriz como a Aquela minha matriz A como sendo P vezes a matriz D vezes a matriz P inversa o significado disso fazendo as contas
é quando eu multiplicar esse cara aqui por algum vetor x eu tô passando pra base dos autovetores aplicando a transformação linear nessa base que consiste numa transformação simples uma matriz diagonal e depois voltando pra minha base normal uma matriz que pode ser escrita assim é uma matriz diagonal certo diagonalizável e para que eu possa fazer isso eu preciso conseguir escrever um vetor qualquer com uma combinação linear de autovetores ou seja os meus autovetores todos os meus autovetores eles devem formar uma base pro espaço vetorial que eu tiver atuando certo se os meus autovetores formarem uma
base então eu sei que a minha Matriz ela é diagonalizável certo eu consigo fazer esse trabalho no sistema de coordenadas dessa base aqui e daí então para fechar as condições que a gente tem que verificar para ver se a matriz é diagonalizável é então que os autovalores todos os vs sejam linearmente Independentes certo se os vetores forem linearmente Independentes a minha Matriz ela é diagonalizável e uma condição é que se todos os meus lambdas todos os meus autovalores forem diferentes então eu posso afirmar que os meus autovetores são linearmente independentes certo pode acontecer da Matriz
ser diagonalizável com alguns lambdas iguais mas sempre que eles forem diferentes a minha Matriz vai ser diagonalizável certo e com isso a gente fecha Então a nossa revisão de todos os conceitos de álgebra linear É isso aí
![[AO VIVO] REVISÃO DE VETORES E ESPAÇOS VETORIAIS - Programação Especial Love Friday](https://img.youtube.com/vi/6YKxOIuq_S8/maxresdefault.jpg)