[Música] o [Música] olá a todos vamos então iniciar nossa primeira aula aqui da disciplina de computação gráfica sejam bem vindos é eu vou começar falando um pouquinho das áreas de aplicação de computação gráfica nem vou começar mostrando alguns exemplos de aplicação é o primeiro que ocorre nessa são as áreas de animação ou de cinema né que é uma área bem é visível e o bem é bem chamativa e que envolve o uso de computação gráfica então diversos filmes aí inclusive blockbusters né que fazem uso na computação gráfica como parte de sua produção então é uma
importante área de aplicação né ainda na área do entretenimento né temos a a parte de jogos aí que muitos de vocês certamente conhece né jogos são neodi usuários e se divertem com 11 jogos que fazem uso fortemente da computação gráfica a área de treinamento é uma área também muito importante da computação gráfica pode contribuir bastante é você tem por exemplo simuladores de vôo ou mesmo na área militar aqui em simuladores e de situações de perigo né mulher é importante que a pessoa se a destra o máximo possível né em situações onde ela não corre risco
é é pra depois utilizado no mundo real num avião um equipamento ipod é proporcionar algum risco à sua segurança uma vez que ela já treinou no simulador o suficiente é ela já fica mais apta a a cometer menos erros quando chegar na situação real área de visualização científica néon onde você tem aqui simulações de fenômenos físicos né no caso aqui de fenômenos químicos e você tem uma grande possibilidade com computação gráfica de visualizar fenômenos que por exemplo fogem aí por exemplo estão em uma escala onde a visão mana não conseguir enxergar por exemplo a interação
entre moléculas uma interação entre campos magnéticos nesse exemplo é que são importantes também áreas de aplicação é área de aplicação e medicina é tanto na parte de de simulação e treinamento médico quanto na parte de exames não invasivos você tem é importante também o marília computação gráfica pode contribuir bastante né como parte da das suas aplicações então você pode ter a ambientes aqui de treinamento virtual o ambiente de realidade aumentada ou de simplesmente realidade virtual que auxiliam é o profissional de medicina a ser mais preciso nas suas ações ou se é mais preciso nos seus
diagnósticos realmente é uma área e onde a computação gráfica pode contribuir consideravelmente bom falando um pouquinho então né definindo não termo computação gráfica né é a gente vai entender a partir dos problemas relacionados à computação gráfica então um dos grandes problemas relacionados à computação gráfica é a transformação de dados em imagem né esses dados essencialmente são é dado geométricos então você tem uma sub área aqui conhecida como modelagem geométrica que se ocupa da produção do armazenamento e da manipulação de dados biométricos né quando você tem a transformação efetivamente né de dados de imagem também conhecida
como síntese de imagem é muitas pessoas chamam esse processo de computação gráfica mas você também vai encontrar na literatura como síntese de imagem então é uma área é correlata também da computação gráfica quando você tem é o caminho inverso é a partir da imagem você quer obter informação sobre os dados que geraram aquela imagem você tem aí a área de visão computacional é que o mário também muito utilizada hoje né sondas e equipamentos robóticos é o mesmo no que ele juiz virtualnet tira-teima né é um processo que usa visão computacional se a partir da imagem
você obtém informações dos modelos que geraram aquela imagem quando a sua entrada de dados é uma imagem a saída também é uma imagem você tem uma sub área conhecida como processamento de imagem então veja aqui nós temos que entender aqui o que são os dados biométricos como manipulá los como gerais da geométricos entender completamente o que que são imagens é como manipular imagens como tratar as imagens e finalmente entender o processo de transformação entre dados e imagens entender esse processo de câmera virtual é bom pra entender esse processo eu vou começar com as definições básicas
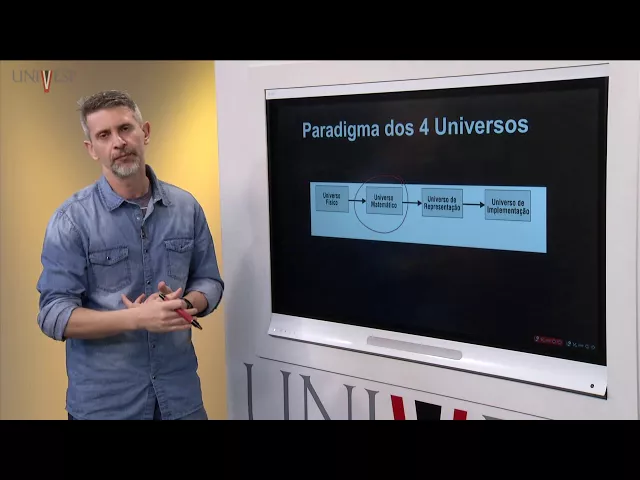
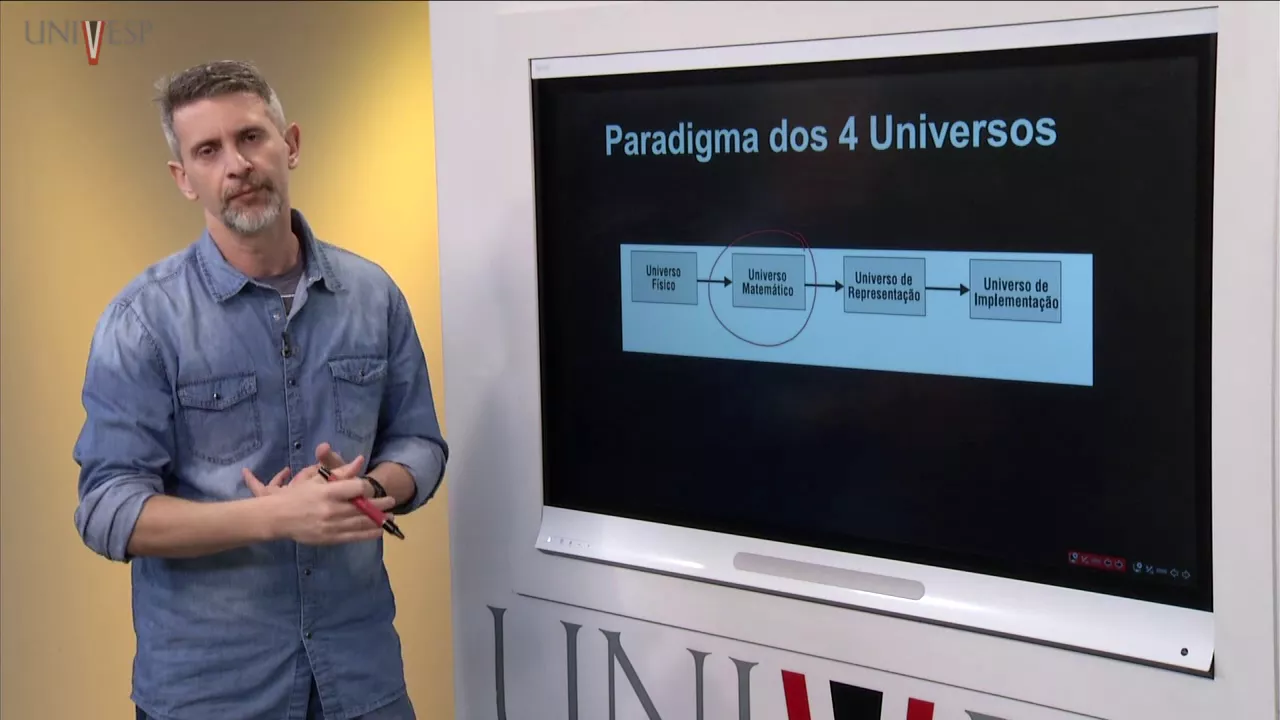
então sempre que a gente quer resolver um problema no computador né a gente vai trabalhar aqui com o paradigma dos quatro universos né significa que eu vou partir de um problema físico seja um problema que está no universo físico né a partir desse problema eu vou encontrar uma equação matemática para esse meu problema seja vou transitar aqui no meu universo matemático como eu quero resolver esse problema utilizando o computador o computador tem uma quantidade infinita uma coisa limitada de memória e de recursos de processamento também é preciso transitar aqui para um universo de representação onde
eu represento essa modelagem matemática por um número finito de símbolos e por algoritmos que eu tenho certeza que vão terminar um tempo razoável e então a partir do meu universo de representação eu posso partir pro meu universo de implementação ou seja onde eu vou escolher uma linguagem qualquer de programação é cejas e c++ python o pascal fim a linguagem que é melhor você dominar né e vou implementar então esses é esse modelo né numa linguagem de minha preferência é o partindo desse pressuposto né é nós vamos entender um pouquinho de geometria da computação gráfica né
comentou partir de dados biométricos e pressuponho que eu tenho objetos geométricos no meu conjunto e que eu quero fazer transformações desses objetos geométricos né então veja a escolha natural né a princípio seria utilizar a geometria euclidiana que aquela que a gente está mais acostumado né então tem várias vantagens têm uma representação fácil de colocar no computador utilizando a geometria euclidiana eu tenho transformações aí que me permitem fazer rotações que me permite fazer transformações de escala é me permitem fazer transações é de maneira relativamente fácil também o problema com a geometria euclidiana é que todas essas
transformações que a gente comentou elas preservam paralelismo e se a gente observar que uma fotografia né eu vejo que linhas que são paralelas no mundo real não estão paralelas na minha fotografia ou seja houve alguma transformação aí geométrica que não preservou paralelismo né então eu preciso de uma geometria envolvida que não preserva o paralelismo a partir daí nós pensamos então no modelo de campo o modelo simples né de câmera de furo também chamado de pinhole que faz a projeção aqui sem preservar o paralelismo faz uma posição aqui com perspectiva nós vamos entender como funciona esse
modelo a partir de agora né e basicamente a gente vai usar uma geometria que se chama geometria projetiva né é ea ideia é justamente eu ter ferramentas que me permitam fazer essa operação de projeção de maneira natural a partir da geometria que eu escolhi o que é o espaço projetivo né vou chamar de espaço projetivo dimensão n né ou rppn ele vai ser o conjunto de todas as retas em rn mais um que passam pela origem é excluindo a própria origem então vou ter um conjunto de retas é os meus objetos geométricos agora vão ser
um conjunto de retas que passam pela origem né não vejo um ponto peek projetivo é pertencente ao rpm é uma classe de equivalência nem significa que dá aquela reta eu posso escolher qualquer representante para indicar o meu ponto específico veja um exemplo aqui no nosso é r 2 o objetivo é representado aqui pelo r 3 veja que eu tenho duas categorias de pontos aqui né eu tenho pontos aqui que estão aqui no plano x y e pontos que não cortam esse plano aqui é que vou chamar de pontos afins pontos cuja última coordenada aqui é
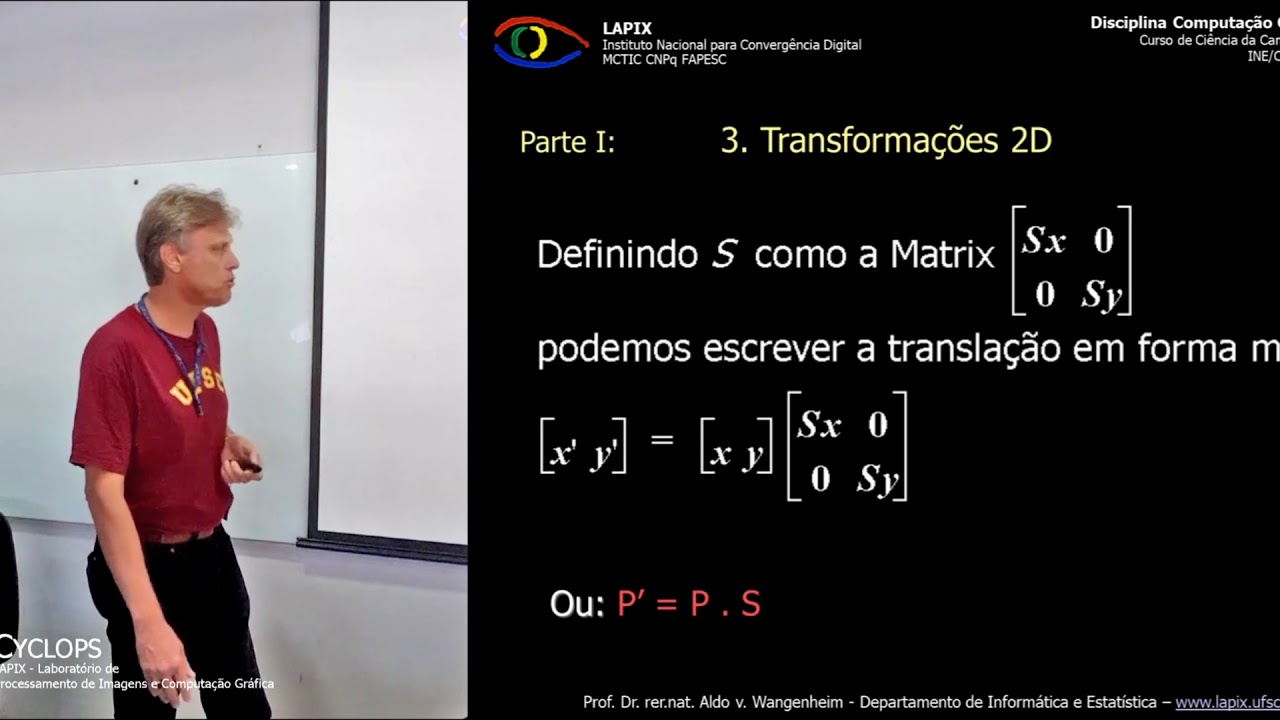
diferente de zero e pontos cuja a última coordenada 02 duas categorias de pontos que diferenciam por uma característica que vai ajudar na nossa projeção então esses pontos você é considerados pontos afins e os pontos que estão aqui hoje a última coordenada zero vão ser chamados de pontos no infinito vamos entender agora uma transformação projetiva né então a gente está pensando no r 3 por objetivo é uma transformação seria uma uma função aqui né do r4 em r4 uma matriz na verdade onde a gente pode dividir essa matriz em quatro blocos né então eu tenho um
bloco 3 por três aqui que é o responsável por todas as transformações lineares que eu teria de r 3 com a geometria euclidiana eu tenho aqui um bloco 3 por um aqui que é responsável pelas operações de translação eu tenho um bloco 1 por três aqui responsável pelas operações de projeção perspectiva e no final tem um bloco 1 por um ac pré responsável pelas operações de escala então veja eu consigo representar todas as transformações que teria no espaço euclidiano mais a transformação de projeção né a partir de uma matriz quadrada só aumentando uma dimensão bom
pra modelar então a nossa câmera virtual que a gente precisa né de um centro óptico seja um centro de projeção não é um plano de projeção pe a uma distância efe desse centro é o sistema de coordenadas aqui com a origem no centro de projeção é importante e com os eixos perpendiculares ap netão se a gente olhar para o nosso a nossa figurinha aqui eu tenho um sistema de eixos aqui perpendiculares o eixo z tá aprontando para o plano pib de projeção e eu tenho um ponto peek que vai ser projetado no ponto pelo minúsculo
aqui no nosso plano pe então veja que eu tenho uma reta um ponto projetivo aqui né é de coordenadas alfa xyz neodi x y z a coordenadas nosso ponto que você será projetado o ponto de ser minúsculo que a projeção necessariamente têm coordenadas é igual à efe então veja que a operação e projeção fica muito simples né basta eu encontrar o alfa que correspondente que é f sobre z multiplicando alfa pelas coordenadas eu vou ter exatamente a última coordenada é igual à f e consequentemente as duas primeiras coordenadas x minúsculo e y minúsculo isso é
equivalente a esse ponto pê projetado o problema é que a nossa a nossa posição da câmera virtual pode não coincidir com origem no sistema então eu preciso de alguns sistemas auxiliares na hora de elaborar essa projeto são né então por exemplo eu vou chamar de sistemas de coordenadas do mundo é que é um sistema onde vou posicionar a minha câmera os meus objetos geométricos a as minhas fontes de luz né e tudo mais que compuseram a minha cena é que eu tô querendo projetar o que eu tô querendo simular no meu computador a partir do
sistema de coordenadas do mundo eu posiciono meus objetos né e aí eu tenho um sistema de coordenadas de câmera ou seja é preciso fazer daqui pra cá uma translação e uma rotação de modo a alinhar o sistema de coordenadas do mundo com um sistema de coordenadas de câmera já no centro de projeção no plano de projeção é eu tenho um sistema de coordenadas que será chamado de sistema de coordenadas de imagem está associado ao plano de projeção e agora é um sistema bidimensional depois desse sistema de coordenadas imagem eu preciso passar por um sistema de
coordenadas de pixel né que tem a ver com dispositivo qual será exibido a minha imagem pode ser a tela do computador pode ser a tela do seu celular é ou pode ser essa tela aqui é inteligente que nós estamos trabalhando né e aí cada sistema de coordenadas de pixel terá sua característica específica em termos de qual o tamanho nem que representa o pixel dentro daquele dispositivo específico então isso deve ser levado em consideração aí na solução das equações também é bom a partir de sistemas então eu consigo montar as minhas transformações de câmera ou seja
eu tenho aqui uma rotação uma translação é 11 uma operação de escala aqui efetivamente eu tenho a operação de projeção e aqui eu tenho a conversão para o meu sistema de coordenadas de pixel é tão compondo todas essas transformações veja que há uma multiplicação de matrizes é eu consigo é de maneira fácil aqui pegar um ponto qualquer e projetar no meu sistema de coordenadas aqui o meu dispositivo desejar bom pessoal é para as próximas aulas então eu vou pedir que vocês é utilizem e dois softwares específicos né pra gente acompanhar ou fazer as atividades desse
curso é um software é o software lázaro o mec é uma idéia de desenvolvimento em linguagem pascal só pra gente fazer alguns exemplos não é pra como poder colocar um pouquinho a mão na massa e outro um software de traçado de raios néel uma técnica de visualização chamada rei três ciné que você pode encontrar aqui no www opovo rei ponto org então eu pedi que vocês baixem né e se familiarize um pouco com esses dois softwares para poderem ser para poder ser utilizados no restante do curso muito obrigado então até a próxima aula nós aguardamos
vocês na aula dores [Música] [Música] [Música] [Música]