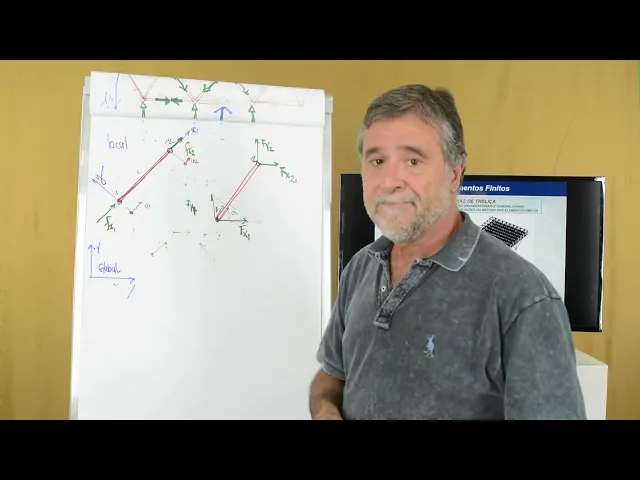
Ok então agora nós vamos resolver aquela questão de montar a rigidez da estrutura a partir da rigidez de cada um dos seus elementos levando em conta que as forças não estão todas numa mesma direção né então a solução para isso é continuar transformando num problema algébrico né projetando força porque a projeção de força é uma grandeza algébrica como é que nós vamos fazer isso então vamos vamos partir de coisas que a gente já conhece e tá repetindo continuamente aqui se essa estrutura está em equilíbrio cada um dos seus elementos também está em equilíbrio então vamos
fazer um diagrama de Corpo Livre deste Element deste elemento deste elemento deste elemento n Então vamos lá vou fazer aqui o diagrama de Corpo Livre desse elemento desse outro elemento aqui fazendo uma vista explodida no fundo né o diagrama de Corpo Livre deste elemento aqui o diagrama de corpo Liv deste outro elemento aqui ok muito bem nós temos o diagrama de Corpo Livre se a estrutura está em equilíbrio cada elemento também está em equilíbrio perfeito muito bem Olha eu não sei qual é o sentido das forças que atuam em cada uma dessas Barras a priori
porque o carregamento ele pode est atuando aqui pode est atuando aqui pode T atuando aqui mas sempre no nó agora uma coisa que eu posso Com certeza dizer é que a força que atua em cada uma dessas Barras ela atua na direção axial Tá certo essa é a condição da trel ela pode est para cá ou pode estar para cá então eu vou colocar em princípio numa direção qualquer porque isso não vai afetar o nosso raciocínio e aqui também eu tenho uma força que atua na direção axial e aqui uma força que atua na direção
axial da Barra o que que fundamentalmente representa a rigidez da estrutura num ponto ela representa né Se eu der uma beliscada aqui ó e tentar dar um levantamento aqui uma levantada unitária aqui cada uma dessas Barras vai contribuir para criar uma dificuldade a isso que é o conceito de rigidez o que eu quero dizer o seguinte na hora que eu vou contabilizar a rigidez nesse ponto numa dada direção eu vou somar molas Essa é a questão fundamental só só que na hora de somar molas isso aqui se tem intensidade TRS isso aqui 4 eu não
posso dizer que a soma D sete porque isso aqui são vetores Mas eu posso fazer o seguinte Olha só eu posso pegar esse cara aqui e dividir isto num componente horizontal no eixo X e outro componente vertical no eixo Y e considerar a projeção dessas forças aqui qual é o resultado dessa operação o resultado dessa operação é que nós temos aqui um componente de força aqui e nós temos um componente de força aqui nós temos um componente de força que é a projeção e nós temos um componente de força aqui agora eu vou lá e
digo o seguinte ó eu vou tirar esse cara daqui eu vou tirar esse cara daqui isso daqui é a mesma coisa que essa força resultante aqui agora veja só o que nós conseguimos este cara este cara este cara e este cara conversam algebricamente entre si Isso é uma soma algébrica como a gente já tinha visto na mola que todas atuam numa mesma direção a mesma coisa eu posso dizer que este cara aqui e este cara aqui atuam também numa mesma direção então eles podem ser tratados algeb o que eu quero dizer é que nós transformamos
essas forças que atuam na direção da Barra que estão numa posição qualquer do espaço em Componentes de força nos eixos x e y que vale pra estrutura como um todo Qual é a ideia que tá por trás disso é transformar o equilíbrio de cada elemento que é referido ao seu sistema local aquele no qual foi desenvolvido o elemento que tá na biblioteca de elementos do software e transformar todas as forças em relação a um sistema de referência único que vale pra estrutura como um todo todas as barras as forças da extremidade vão ser representadas em
forças no eixo X e em forças no eixo Y as forças no eixo X todas conversam entre si algebricamente e as forças no eixo Y todas conversam no eixo Y entre si algebricamente nós transformamos um problema na representação vetorial num problema algébrico já que Projeção de força é uma grandeza algébrica isso é o conceito da física básica tá claro é isso que nós vamos fazer então primeiro passo a estratégia né né antes de fazer conta é Aquela Velha História onde que eu quero chegar por que que nós estamos fazendo isso porque eu quero calcular a
rigidez da estrutura a partir da rigidez de cada um dos seus elementos mas o que que é somar rigidez é s uma força uma força é uma grandeza vetorial Ah mas fazer vetor É como diz um amigo meu é muito complicadíssimo né Ó que que eu faço eu vou transformar em grandeza algébrica como é que que eu consigo fazer isso sem sofrimento projetando as forças no eixo X no eixo Y e depois a gente vai falar do eixo Z que é no espaço que é o mesmo conceito então agora estabelecido Qual é o nosso objetivo
por que que nós estamos fazendo isso agora eu vou fazer uma figura de uma barra né primeiro nós mostramos a estrutura inteira depois nós mostramos algumas barras que chegam no mesmo ponto todas podendo conversar entre si Ô esse cara esse cara esse cara e esse cara conversam entre si Sem sofrimento algebricamente agora nós vamos detalhar mais eu vou pegar esta daqui e vou estudar esta vamos fazer isso aqui então ok está Claro porque que nós estamos fazendo isso né então nós vamos fazer agora uma figurinha e vamos dar toda a atenção a uma das Barras
olha olha só essa barra aqui essa barra aqui aliás Isso aqui é uma treliça né é uma barra de treliça Isso é uma mola de constante elástica EA so l e usando a mesma nomenclatura da mola local Este é o ponto um e este é o ponto dois né e aqui eu vou colocar o eixo que a gente já tinha combinado né Sempre quando eu represento um elemento no âmbito local esse aqui é o eixo X né Ele sempre vai do nó um para nó 2 a regra da mão direita este aqui é o eixo
Y que que é isso daqui essa é a visão que nós temos do sistema local de coordenadas igual a mola não mudou nada aliás todo o software de elementos finitos para ser de uso absolutamente geral o elemento tem que ser definido no seu sistema local de coordenadas Tá certo porque a barra sempre trabalha sobre ação axial a posição que ela tá no espaço é uma mela mera questão de projeção de forças Então nós vamos fazer a representação aqui dos carinhas olha isso aqui é a força um lembra isso daqui é a força do como a
gente já tinha feito na mola só que aqui é a força 1 atua no eixo X então nós vamos adotar A nomenclatura fx1 e aqui é o fx2 Isso aqui é uma nomenclatura que nós vamos seguir né E como um padrão no no sistema local nós vamos representar as as grandezas como letra minúscula né então F1 F2 aqui é o fx1 aqui é o f de X2 e esse daqui é o deslocamento que é o deslocamento u1 e esse aqui é o deslocamento U2 beleza isso aqui é o comprimento L da Barra muito bem agora
nós vamos representar a mesma a mesma barra a mesma Idêntica Olha o nó um aqui e óleo nó do só que o equilíbrio agora ele não é representado mais nesse eixo local Mas nós vamos representar o equilíbrio da Barra no eixo global que que eu quero dizer com isso aqui tem um Y grande e um X grande Olha só um Y grande e um X grande isso aqui é o sistema global de coordenadas quando você abre o software de elementos finitos a primeira coisa que aparece é esse sistema global de coordenadas só que é o
seguinte esta força que está aqui atuando na direção da Barra ela tem um componente aqui e ela tem um componente aqui então eu vou fazer a representação olha aqui desse ângulo aqui que é o alfa esse ângulo define a posição que a barra está no espaço né primeiro nós estamos falando do plano que que vai acontecer aqui bom eu tenho aqui um componente de força que é um F X1 maiúsculo ele tem um componente aqui e aqui eu tenho um F Y2 maiúsculo aqui perdão F y1 né Aqui nós temos um fx2 e Aqui nós
temos um F Y2 porque isso aqui se refere ao nó do e esse aqui é o nó 1 ou seja como nós havíamos combinado o equilíbrio do elemento que aqui está expresso no sistema local ele é é representado agora no sistema Global Só que essa barra é a mesma né a barra ela não tá sabendo se ela tá sendo estudada no local ou Global né você chegar para lá e falar olha nós estamos analisando o seu equilíbrio no sistema local agora é no global a barra não vai se adaptar para isso agora o que eu
posso dizer sem medo de errar é que se essa barra está em equilíbrio e este equilíbrio é o mesmo tem como né Se eu pegar essa força aqui e eu projetar aqui e eu pegar essa outra força e eu projetar aqui a soma dessas duas tem que ser essa não dá para ser diferente tá certo ou não vamos escrever isso então eu vou colocar aqui esse fx1 Olha só esse fx1 vai ser o fx1 projetado nesta direção e este é o ângulo Alfa lembra lá da física básica Quando Você projeta a força na direção do
ângulo ó é o famoso F cosseno vai ser o fx1 que multiplica o cosseno do alfa e esse cara é o F1 Grand é o F1 como isso daqui é Alfa isso aqui é 90º isso daqui é 90 - ala na hora que você multiplica o f cosseno de 90 - alfa o cosseno de 90 - Alfa é igual Seno do Alfa então ficou esse cara aqui beleza da mesma maneira quando você faz a projeção nessa direção você vai ter a projeção desse componente de força aqui né ó que vai dar isso aqui E esse
componente de força que vai dar isso aqui a soma dessas duas forças né tem que dar o componente nessa direção aí é que surge uma questão Olha só nós temos um problema aqui que é um problema né administrativo trabalhista imagina esse cara aqui que é a barra de treliça que tem uma rigidez e so L aí ele fala assim eu sou uma treliça eu sou uma treliça o que que eu faço eu transmito força xal transmito quantos componentes de força eu tenho aqui duas quantos componentes de deslocamento do e na hora que eu projeto pro
Global quantos componentes de força nós temos 1 2 3 4 e pelo mesmo motivo esse vetor deslocamento vai ter um componente aqui e um componente aqui ou seja esse cara faz a mesma coisa do que esse cara faz só que esse cara aqui tem dimensão 2 por2 né porque é duas forças e dois deslocamentos Esse cara é 4 por4 pô o que que esse cara vai fazer ele vai no sindicato das treliças né Ele fala Como assim o cara faz a mesma coisa que faz ele é 4 por4 eu sou 2 por 2 como é
que a gente faz isso aqui a gente faz assim ó dá um dá um cargo para esse cara mas não mexe no salário dele pel AM amor de Deus né então eu vou colocar aqui um fy1 ó tá vendo aqui ó um fy1 e vou colocar um fy2 são forças cortantes aí você fala ah Mat treliça não transmite força não tem problema isso aqui é zero porque não inf floi nem contribui para nada Resumindo tá claro esse cara aqui a gente colocou esse cara aqui só para fazer número para esse esse cara ter quatro forças
e aqui eu tenho quatro forças também esse cara que é 2 por 2 vai se comunicar com o que tem 4x 4 não então a gente fez ele tem 4x 4 então vamos fazer essa conta o fy1 Olha só esse fy1 vai ser a soma do quê dessa projeção mais essa projeção se eu pegar aqui ele tá em sentido contrário vai ficar menos f de X1 né fx1 que multiplica quem o seno do Alfa porque eu tô projetando nessa direção e mais o fy1 que multiplica o cosseno do Alfa beleza os outros é igual né
Essa figura é a mesma que essa só mudou o índice então eu vou tomar a liberdade de escrever fx2 é fx2 cosseno do Alfa mais o fy2 seno do Alfa perfeito e aqui nós vamos ficar com o fy2 que vai dar - fx2 Seno do Alfa mais o fy2 que multiplica o cosseno do Alfa Essas são as relações que fundamentalmente transformam o equilíbrio de forças do elemento de barra que é Expresso do sistema local para o sistema global ou seja isso aqui é uma mera transformação de forças Por que que nós estamos fazendo isso porque
todas as barras daquele modelo T que estar expressas dessa forma porque as forças x conversam com as forças x algebricamente as forças Y vão conversar com as forças y algebricamente e aí eu consigo ter né esse tipo de de uma maneira muito mais tranquila sem necessidade de trabalhar com vetor no espaço Essa é a questão fundamental perfeito então nós conseguimos fazer uma transformação fundamental aqui usando a treliça como um pano de fundo Ou seja quando você vai montar a matriz de rigidez da estrutura a partir da Matriz de rigidez de cada um dos seus elementos
você está somando força só que como todos os elementos não estão na mesma direção elas estão em direções diferentes essa soma vetorial Mas isso é Inconveniente Então você vai transformar em algébrico como você faz isso projetando forças ou seja todas as forças que representam o diagrama de Corpo Livre que são expressas em princípio no sistema local elas são transformadas para o sistema global que é um sistema de referência que vale paraa estrutura como um todo e aí você tem uma mera transformação trigonométrica em que as forças locais e globais conversam entre si por uma mera
Projeção de forças que depende do ângulo que a barra tá orientada no espaço perfeito Então nós vamos fazer isso agora vamos transformar numa linguagem adequada paraa anotação matricial o problema físico já foi resolvido Então vamos dar um salto e com isso chegar praticamente no final de todo esse processo de montagem Ok é o que nós vamos fazer agora então nós conseguimos fazer a transformação do equilíbrio de um elemento ou seja o diagrama de Corpo Livre dele com as forças que justificam o equilíbrio dele do sistema local para o sistema Global Isso é uma mera Projeção
de força Por que nós fizemos isso porque nós queremos montar a rigidez da estrutura a partir da Matriz de rigidez de cada um dos seus elementos Então nós vamos somar componentes de rigidez mas rigidez é uma grandeza física Clara é força é um caso muito particular é força associada a deslocamento unitário Mas é uma força e força tem direção e tem sentido exatamente por isso como diz o o sábio oriental né o pior escravo é que carrega pedra e não sabe por quer dizer nós estamos fazendo contas aqui mas tem que ter um motivo não
faz sentido a gente começar a fazer passagens matemáticas eh sem ter um objetivo final nós estamos fazendo essa transformação porque nós queremos que todas as forças Conversem entre si na estrutura inteira algebricamente por isso que nós estamos fazendo Projeção de força porque Projeção de força é uma grandeza algébrica agora nós chegamos numa questão central ó isso aqui são as equações que transformam força do sistema local para global e vice-versa pergunta recorrente que vou vai acontecer várias e várias vezes o que que isso tem a ver com Matriz nada é já falamos isso né o cara
que faz física e o cara que faz educação física né não tem nada a ver uma coisa com outra isso aqui é o seguinte isso aqui é expressão do equilíbrio por intermédio das equações da estática agora do ponto de vista computacional é extremamente interessante eu transformar isto aqui numa anotação matricial que é a maneira mais compacta e elegante de representar um sistema de equações então aqui nós poderemos fazer isto olha só aqui são as forças que agem neste elemento e que justificam o equilíbrio dele eu posso colocar fx1 fx2 fy1 fy2 ou fx1 fy1 fx2
dentro de uma matriz essa uma Matriz tá aqui ó eu vou colocar aqui ó de forma compacta é isso e o produto de matrizes nós podemos colocar aqui um F grande Olha só fx1 grande fy1 grande fx2 e F2 se você fizer a multiplicação linha coluna você vai ter uma matriz aqui olha só que é uma matriz que eu vou chamar de T né Essa Matriz aqui como eu devo entend ISO isso aqui são as foras ISO da seere apenas a um elemento um um elemento são as foras que justifica o equilíbrio de um elemento
no sistema local isso aqui representam as forças que justificam o equilíbrio de um elemento no sistema Global ó aqui ó e o que é isto Isso é uma matriz de seno e cosseno Isso é uma matriz trigonométrica Isso é uma matriz que permite transformar forças do sistema local para o sistema Global em um elemento daí o nome como é o nome que eu dou para essa Matriz ela é uma matriz de transformação Por que que ela se chama Matriz de transformação porque ela transforma que que ela transforma força do sistema local por global e vice-versa
então isso daqui representa de forma compacta a transformação de forças do sistema local para o sistema Global Por que que nós estamos fazendo isso porque eu quero montar a rigidez da estrutura se eu eu tiver 1 milhão de elementos no meu modelo essa transformação tem que ela tem de ser feita 1 milhão de vezes é para isso que o software é pago não é para fazer modelo já falei disso você pedir para software fazer modelo para você a sée o Moral com o software Coitadinho do software el é pago para fazer isso o software vai
fazer essa conta aqui se você tiver 1 milhão de barras é 1 milhão de transformações Porque você só vai poder somar forças algébricas ente quando todas estiverem relacionadas a um sistema de referência único que vale pra estrutura como um todo é isso aqui mas pera aí vamos fazer uma conta direito esta força tem componente aqui e aqui E esse carinha aqui o um hein ele também não é um vetor quer dizer só que um é vetor força o outro é vetor deslocamento Então se este cara é um vetor deslocamento ele também tem componentes na dire
x e na direção Y ele tem um U maiúsculo e um v maiúsculo o que eu quero dizer o seguinte da mesma maneira que você escreveu que as forças locais igras para um elemento se relacionam pela Matriz de transformação nós vamos fazer a mesma coisa ó esse aqui são os deslocamentos locais e esses são os deslocamentos globais e aqui entra a matriz de transformação já que os ângulos são o mesmo então isso daqui ó local isso aqui Global a matriz de transformação é a mesma Tá certo então vamos fazer uma conta aqui que que sobreviveu
de toda essa conversa nossa Olha eu vou escrever aqui pra gente não esquecer hein nós estamos falando de um elemento um elemento essa eu vou eu vou eliminar o símbolo de Matriz só para uma questão de não ficar muito né Nós estamos tratando com matrizes eu quero dizer o seguinte Essas são as forças que justificam o equilíbrio do elemento no sistema local Essas são as forças que justificam o equilíbrio do elemento no sistema global e aqui entra a famosa de transformação isso aqui são os deslocamentos do elemento no sistema local Esse é o deslocamento do
elemento quando eu projeto deslocamento nos eixos locais Essa é a famosa Matriz de transformação isso aqui veio do conceito de Equilíbrio e Projeção de força ninguém tá inventando nada ninguém tirou um coelho da cartola aqui agora o que nós sabemos que vem lá desde o começo é que que existe uma relação entre a força que que é isso aqui isso aqui é a matriz de força que justifica o equilíbrio de um elemento o sistema local e isso daqui é o deslocamento do elemento no sistema local e isso daqui é a matriz de rigidez do elemento
Então vamos colocar aqui vá ó isso aqui nós já fizemos pro elemento de mole pro el treli força deslocamento rigidez só que a partir desta relação eu posso vir aqui então eu posso colocar aqui que essa Matriz T vezes essa Matriz F é igual a matriz de rigidez do elemento vezes este cara aqui olha só que interessante Qualquer que seja o elemento finito a relação entre força que hae do elemento e deslocamento do elemento é a sua matriz de rigidez relação entre força e deslocamento é rigidez isso daqui são as forças que justificam o equilíbrio
do elemento no sistema global isso aqui ó um elemento sistema Global isso daqui são os deslocamentos de um elemento no sistema Global Olha só se você imaginar que aqui é a força que justifica o equilíbrio de um elemento no sistema global e aqui é o deslocamento de um elemento no sistema Global a relação entre os dois deve ser a matriz de rigide do elemento no sistema Global o que eu tô querendo dizer é que como a matriz de rigidez de um elemento expressa a relação entre força e deslocamento dele eu posso fazer a expressão dessa
Matriz no sistema local quando as forças são representadas no sistema local ou no sistema Global quando as forças são representadas no sistema Global o que eu tô querendo dizer é que quando você monta o modelo em elementos finitos antes de montar a matriz de rigidez da estrutura o software ele tem que transformar a matriz de rigidez de cada elemento do sistema local para o sistema Global se tiver 1 milhão de elementos ele tem que fazer 1 milhão de transformações antes de montar essa Matriz é isso que nós vamos fazer agora olha só só que para
fazer isso esse cara aqui eh tá atrapalhando né porque senão o problema já estaria resolvido isso aqui é força no sistema Global isso aqui é deslocamento no sistema Global dá uma vontade louca de passar pelo outro lado dividindo né se o matemático ouve falar isso aí ele me processa né porque nós estamos fazendo operação matricial então eh deixa eu abrir um parênteses Desculpe ter que falar nisso mas só pra gente relembrar todos vocês já sabem mas antes de fazer aquela operação eu gostaria de relembrar um tema que todos vocês conhecem mas isso é bom a
gente eh são as operações que envolvem matrizes né E vamos fazer um paralelo com a álgebra na álgebra a gente Costuma se referenciar ao elemento neutro na multiplicação o que que é o elemento neutro na multiplicação é o número um se você multiplicar um número pelo número um você tem o próprio número todo mundo conhece isso isso aqui nós estamos falando da álgebra né os primeiros estudos da matemática agora eu tô falando da álgebra matricial no estudo de matrizes quando você pega uma matriz qualquer existe vamos falar assim de uma maneira informal que é o
número um das matrizes né o elemento neutro na multiplicação matricial juridicamente representa o número um na operação Matriz que é a chamada Matriz identidade o que que é a matriz identidade a matriz identidade é uma matriz que na sua diagonal principal só tem o número um e fora da Diagonal principal todo mundo é zero qual é a característica que a gente aprende na operação matricial quando você multiplica uma matriz pela correspondente matriz de identidade isso gera a própria Matriz isso é uma coisa que você pode fazer como exercício né para lembrar é o elemento neutro
Tá certo da mesma forma lá na álgebra a gente tem o conceito do Inverso de um número né todos lembram disso desculpe falar nisso que é uma coisa tão Óbvio mas o que que é o inverso de número se você multiplica um número pelo seu inverso você gera o elemento neutro que é o número um para você poder fazer essa operação tem uma coisa que é uma imposição né que todo mundo esse número cinco aqui ou qualquer número aqui que você pegue para você calcular o inverso necessariamente ele tem que ser diferente de zero da
mesma maneira existe o conceito de matriz inversa Se você pegar uma matriz é possível é possível definir uma matriz que é a matriz inversa de sorte que a multiplicação da Matriz pel a sua matriz inversa gera a matriz identidade tá certo é o conhecimento da matriz inversa que vai permitir a gente resolver aquele problema de passar a matriz de rigidez do elemento do sistema local para o sistema Global existem três carinhas aqui vamos dizer assim que estão presente no cálculo da matz inversa um que é o conceito de determinante todo mundo sabe que é o
determinante da matriz aquelas regras práticas de de se efetuar o cálculo do determinante regra de sarros por exemplo né Você multiplica os termos da Diagonal faz o produto e depois da Diagonal da outra diagonal diminuição primeiro é o conceito determinante segundo que é o conceito de fator que a gente estuda na matemática tá certo através do determinante através do cofator e através do conceito de matriz transposta A gente chega no inverso de uma matriz esses três conceitos Nós também vamos relembrar de forma muito breve para poder voltar nestas transformações que a gente tava a um
passo de determinar a matriz de rigidez do elemento no sistema Global porque a relação entre força global e deslocamento Global deve ser a matriz de rigidez do elemento no sistema Global só que para isso nós precisamos de alguns conceitos da matemática que todos vocês sabem né o determinante é um número né a matriz é uma tabela né a matriz é uma tabela o determinante vamos dizer é o representante jurídico dessa tabela é um número que representa essa tabela conceito de cofator nós vamos relembrar brevemente e o conceito de Matriz transposta também com esses três conceitos
a gente volta e aí nós conseguimos fechar de uma maneira completa todo o procedimento de montagem onde a partir da rigidez de cada elemento nós vamos montar a rigidez da estrutura Qualquer que seja a posição do elemento no espaço Qualquer que seja a orientação dele com isso a gente tem o primeiro alicerce com completamente montado E aí nós vamos começar cada vez entrar mais na definição do elemento que que eu quero dizer definição do elemento é a partir do deslocamento nodal saber como o elemento se deforma ah mas nós não fizemos isso fizemos só que
nós fizemos pra mola a mola é tão banal tão banal que quando começou a teoria já acabou F = HX então a gente Aproveitou a mola que tinha uma deformação muito simples para entender uma coisa muito maior do que ela que é o processo de montagem e a treliça que é uma mola de constante elástica e a so L nós usamos para entender uma coisa muito maior que a treliça que é entender a transformação de coordenada a partir do momento que a gente entendeu esse Pilar nós vamos partir agora pro mundo mais profundo que é
como os elementos se deformam os elementos mais sofisticados dado que a questão da Montagem já foi resolvida só falta isso ok então Eh nós falamos do determinante do cofator e da Matriz transposta porque eh eles são digamos assim atores nesse processo da inversão da Matriz o conceito de determinante todos nós já já temos claro né das aplicações que a gente fazia na matemática né é existe um outro conceito que é o conceito do cofator né o cofator eu vou colocar uma matriz inha aqui para vocês fazerem uma lembrança nós estamos aqui não demonstrando nós estamos
mostrando Relembrando né colocar uma matriz aqui 4 8 2 5 3 9 4 2 e 5 por exemplo Isso aqui é uma matriz que que tem dimensão 3 por TR três linhas e três colunas né muito bem quando você vai inverter uma matriz uma das primeiras coisas importantes que é demonstrada na matemática é que a cada termo desta Matriz você associa um complemento algébrico ou um cofator lembram disso ISO a gente estudava em toda operação matricial quer dizer o seguinte você já começa a perceber que o processo de inversão de uma matriz é muito trabalhoso
você imagina se você tem uma matriz de 1 milhão por 1 milhão que é um modelo de 1 milhão de graus de liberdade né Se você pegar um modelo de 1 milhão de nós que é uma coisa hoje e normal até e Cada nó tem 6 graus de Liberdade como numa viga Você tem uma matriz de 6 milhões por 6 milhões Teoricamente você teria I calcular se 6 milhões de cofatores é que o procedimento de fazer isso é numérico mas isso dá uma boa ideia pra gente do que nós estamos falando por exemplo vamos calcular
o cofator deste número que tá aqui a cada um desses termos você associa um cofator e se você quiser calcular a matriz inversa você precisa conhecer todos esses cofatores Qual é o procedimento né só para relembrar na prática você elimina a linha e elimina a coluna que passam por esse termo quem é que sobreviveu essa Matriz 8 2 4 e 2 né como é que a gente calcula o cofator desse termo aqui esse aqui tá na linha 2 e na coluna 1 que é o a21 lembra da Matemática é -1 elevado a i + j
o que que é i j é a linha coluna como eu tô na linha 2 isso aqui é 2 + 1 ou seja esse -1 ele não serve para nada só serve para dar um sinal né E aqui multiplicado pelo determinante da matriz que sobrou que é o 8 2 o 4 o 2 ou seja isso aqui vai dar -1 porque isso aqui é ímpar né quando a soma der ímpar Isso aqui vai dar -1 quando a soma de par vai dar 1 8 x 2 16 - 4 x ou seja 81 - 8 vai
dar 8 Tá certo então o determinante 8 x 2 16 - 8 ou seja o cofator desse cara D8 se você quisesse inverter essa Matriz primeiro lugar você teria que calcular o cator de cada um desses caras inver uma matri 3 por TR você tem que calcular nove cofatores aliás nós mencionamos que naquele no livro de elementos finitos né que o primeiro livro tinha um exercício de mola que era muito parecido com aquele que nós fizemos aqui só que esse aqui era muito menos trabalhoso naquele exercício que eu citei no livro tem um exercício que
você vai ter que calcular os cofatores D um trabalho numérico maior porque é uma quantidade de molas imensa lá né imensa mais ou menos né então primeiro conceito de cofator e segundo é o conceito de Matriz transposta Se você pegar por exemplo essa Matriz aqui 4 8 2 3 5 9 5 4 e 2 O que que é a matriz transposta desta Matriz é a matriz que você troca a linha por coluna ou seja o o a e j ele se transforma no a ji que que eu quero dizer com isso eu vou colocar a
matriz aqui 4 5 e 2 eu vou trocar a linha por coluna esse cara aqui é o cara 1 2 ele passa a ser o Cara 2 1 e esse aqui passa a ser o TR esse aqui era o do ele passa a ser aqui embaixo e o CCO passa a ser aqui esse cara aqui era o era o A2 3 ele passa a ser o a32 esta matriz e a matriz transposta dessa ou seja trocar criar uma matriz transposta transformar linha em coluna tá certo trocar linha por coluna E aí lá na matemática a
gente consegue demonstrar que dado uma matriz como é que a gente calcula a sua matriz inversa é um sobre o determinante da matriz A que multiplica a matriz dos cofatores transposta que eu quero dizer é o seguinte se você tem essa matriz e você calcular a inversa dela ou seja a matriz que ela multiplicada pela sua inversa gera a matriz de densidade primeiro você tem que Calcular o determinante aquela regrinha de determinante segundo você tem que calcular nove cofatores depois você tem que trocar a linha por coluna aí você calcula a matriz inversa bom a
primeira coisa que você percebe né que a gente já sabe da Matemática é que se você for Calcular o determinante aqui ele não pode ser zero senão você não vai conseguir calcular isso tem um sentido físico concreto no cálculo estrutural é por isso que quando você Calculava a matriz de rigidez o determinante não podia ser zero se aplicava a restrição Tá certo então essa é a matriz inversa então agora Finalmente nós vamos chegar aqui olha só Matriz de transformação forças que justificam o equilíbrio do elemento no sistema Global deslocamento Matriz de transformação se nós pré
multiplicarmos essas duas expressões pela inversa da Matriz de transformação nós não vamos alterar essa equação o que que é a matriz de transformação inversa multiplicada pela Matriz de transformação é a matriz identidade o que que é a matriz identidade multiplicado pela Matriz f é a própria Matriz f porque este cara é o elemento neutro na multiplicação Então olha só aonde é que nós chegamos esta operação vai nos conduzir a isso que que é isso aqui isso daqui são as forças que justificam o equilíbrio de um elemento no sistema global que que é isso daqui são
os componentes de deslocamento de um elemento no sistema o quê global que que é isso aqui é a matriz de transformação que que é isso aqui é a matriz de rigidez do elemento no sistema local e isto aqui isso aqui é inversa da Matriz de transformação aí o cara fala assim puxa mas se eu tiver um modelo com 1 milhão de elementos eu tenho que calcular 1 milhão de matrizes inversas em princípio sim porém porém essa Matriz de transformação ela tem uma característica muito particular que é própria da Matriz de transformação pra Matriz de transformação
quando você tem um sistema que é ortogonal que é o sistema que nós estamos trabalhando em Sistemas ortogonais a inversa da Matriz de transformação a gente demonstra que é a própria transposta dela isso se demonstra na matemática é um bom exercício que você pode fazer no fim de semana né você pegar a matriz de transformação calcular inversa depois trocar a linha por coluna vai ver que d a mesma coisa então que eu vou colocar aqui olha só onde nós chegamos Essas são as forças que justificam o equilíbrio do elemento no sistema Global Esses são os
deslocamentos de um elemento no sistema Global o que é isto daqui Isto daqui é a relação entre força e deslocamento Então isso é rigidez acabamos de descobrir como que se monta a matriz de rigidez de um elemento no sistema o quê global é a matriz de transformação transposta vezes a matriz de rigidez local e vezes a matriz de transformação Sabe o que eu tô querendo dizer eu tô querendo dizer o seguinte você monta um modelo em elementos finitos você tem que montar a rigidez da estrutura a partir da rigidez de cada um dos seus elementos
quando o software traz o elemento lá do software ele traz no sistema local porque todo o elemento finito para ser de uso geral tem que ser montada no sistema local aí ele faz 1 milhão de transformações se tiver 1 milhão de elementos ele passa do sistema local para o sistema Global depois ele monta a rigidez da estrutura porque todas as foras que justifica o equilíbrio de elemento estão referidos a um sistema de coordenadas único associado à estrutura como um todo então agora nós podemos nós podemos voltar aqui e resumir tudo o que nós fizemos juntos
só tá faltando uma coisa aqui ó Tá faltando isso aqui olha só que a matriz de rigidez do elemento no sistema global e Aqui nós temos uma transformação que a matriz de transformação transposta Matriz de rigidez local Matriz de transformação Resumindo você tem uma estrutura essa estrutura é dividida em elementos os elementos estão conectados nos nós quando você monta o modelo você vai lá o software vai lá na biblioteca buscar o elemento e ele traz a rigidez do sistema local se tiver 1 milhão de elementos ele transforma a matriz de rigidez do elemento do sistema
local para o sistema Global isso quer dizer que o equilíbrio de forças de elemento é transformado do eixo local para o eixo Global através da Matriz de transformação que é esse cara aqui se tiver 1 milhão de elementos 1 milhão de operações aí é aqui ele vai montar a matriz de rigidez da estrutura ele só monta a rigidez da estrutura pelo processo direto de montagem após ter feito a transformação de todas para o sistema global determinante é zero aplica a restrição aplica o carregamento vai no solver calcula os deslocamento dos Nós calcula as reações de
apoio e a partir disso é que ele vai calcular a força interna no elemento Ou seja a matriz de transformação ela transforma o equilíbrio de forças do local pro Global através daqueles ângulos Alfa né no caso do espaço não muda né no caso do espaço é que os vetores estão no espaço então eles formam eh os ângulos com os eixos coordenados né por isso é que tem aquele conceito que vocês aprendem no cálculo dos cossenos diretores Olha lá lembra cosseno diretor é que define o ângulo que ele forma com os eixos x y z conceitualmente
não mudou nada só dá um trabalho numérico maior é o software é pago para isso Ceno porque ele define a direção no espaço né Só por isso né porque não tem Ceno gerente Ceno coordenador né senão ia ter também certo o con diretor define a direção nos três eixos Isto daqui isso aqui o cara tem que saber se o cara faz um mapa disso aqui ó põe lá na frente da sua do seu micro que você tá trabalhando o cara que trabalha com elementos sinistro ele tem que ter esse mapa na cabeça não tem problema
vai lá com uma cola lá na fila Mas pode colar né Você pode ter um resumo lá é é importante que você em cada instante você você sabe Onde que você tá nesse processo isso aqui resume todo o histórico dos processos de elementos finitos então nós chegamos no final da coisa da primeira parte como resolver o problema Global rigidez da estrutura a partir da rigidez de cada um do seu do elementos cujo objetivo final é calcular o deslocamento dos nós agora daqui para frente é que nós vamos ver como vai ficar muito bem eh desde
o começo nós comentamos que o método dos elementos finitos ele tem duas grandes estratégias né A primeira delas é você montar a rigidez da estrutura a partir da rigidez de cada um dos seus elementos né para que a gente possa determinar a deformada da estrutura por intermédio dos deslocamentos nodais isso não é uma primeira instância a partir do instante que você tem os deslocamentos nodais nós vamos determinar Olha só imagina isso aqui é real hein isso é real eu vou aplicar o deslocamento nodal o elemento se deforma todo o esforço que nós vamos fazer da
aqui para a frente é para os diversos elementos que não não são tão simples quanto a mola ou quanto a treliça determinar matematicamente qual é a função que traduz a deformada do elemento no fundo o que eu quero dizer é o seguinte a partir do deslocamento nodal nós vamos determinar o deslocamento dentro do elemento e como consequência a deformação dele aliás é tudo que o engenheiro de estrutura quer ele precisa determinar como a estrutura se deforma e se essa deformação é aceitável ou não do ponto de vista dos critérios de engenharia estrutural Essa é a
questão central do mé doos elementos finitos que tá incorporada na sua raiz né uma questão que tá no DNA dos elementos finitos nós não estamos resolvendo elemento diferencial então de toda essa conversa ficou isso aqui né eu vou nesse mapa porque nós estamos nos despedindo da primeira parte quer dizer tudo que nós vamos falar daqui pra frente é óbvio que isto daqui já foi resolvido isso é muito importante quer dier o seguinte você faz um modelo quem faz é usuário ele divide a estrutura em elementos os elementos estão conectados nos nós a partir do conhecimento
da rigidez de cada elemento que é no sistema local de coordenadas ele transforma a matriz de rigidez pro sistema Global se o modelo tiver 1 milhão de elementos ele faz 1 milhão de transformações só depois que ele pode pensar em montar rigidez da estrutura por quê Porque rigidez da estrutura é obtida através de um processo que é um somatório de forças e força tem direção e sentido se o cara gosta de sofrer ele vai fazer isso da forma vetorial mas não a gente tá transformando tudo em relação a um sistema de referêncial único que vale
paraa estrutura como um todo que é o sistema Global qualquer elemento finito para ser de uso geral ele tem que ser formulado no sistema local de coordenadas porque o cara que desenvolver o software não tem nenhuma obrigação de saber aonde que ele vai enfiar aquele elemento pô depende do cara que tá fazendo o modelo então isso aqui é o produto da Matriz de transformação transposta Matriz de rigidez do elemento local Matriz de transformação depois é que se monta a rigidez da estrutura a partir da rigidez de cada elemento no sistema Global ele monta a matriz
de rigidez da estrutura aí o determinante é zero ele aplica a restrição aplica o carregamento e aí ele vai usar o solver para calcular os deslocamentos ou seja o grande subproduto que sai da primeira parte é calcular o deslocamento Dent dos Nós a reação de apoio e aí entra o que nós vamos gastar um tempo até a metade né até o final desta metade até o final nós vamos passar investigando como é que o elemento se deforma mas isso pressupõe que o deslocamento nodal já está resolvido não se esqueça disso jamais tô falando isso porque
às vezes é uma pergunta recorrente a gente tá no meio do desenvolvimento Aí surge a pergunta mas e aquele deslocamento eh de onde ele veio ele já ele foi resolvido aqui tá claro então o grande passo Inicial é montar a rigidez do conjunto A partir de cada elemento subproduto é deslocamento nodal agora daqui para frente tudo vem a partir do deslocamento nodal Então nós vamos começar nós Já estudamos o elemento de mola e o elemento de treliça olha só a mola permitiu estudar o processo de montagem a treliça ela permitiu estudar a transformação de coordenada
são conceitos muito mais amplos que valem para qualquer elementos finitos aí você fala assim ah mas o elemento de mola é muito particular e nos elementos gerais não não a mola tem olha aqui ó ó a mola aqui ó aplica uma força ela volta Isso aqui é uma mola ou seja o modelo de elementos finitos é um mar de molas quando a gente desenha aquelas molinhas lá que deu subsídio para montar todo o raciocínio nós estamos falando do modelo mais geral el isso claro isso tem que estar Claro não posso ter dúvid sobre isso vocês
fizeram aquele exercício das Molas fizemos juntos e no livro tem um exercício igualzinho só que é mais trabalhoso porque tem mais molas agora para encerrar essa discussão Inicial porque depois nós est importante que é um elemento de viga que também tem uma importância assim imensa bom primeiro porque você vê um monte de estrutura que é constituída de viga né É só andar no dia a dia aí da construção e você vê um monte de estrutura metálica que é constituída de vigas né vigas como Aquela que a gente até eu vou mostrar uma figura agora da
Viga que é uma figura Que Nós já mostramos no primeiro encontro aqui que que a gente lembra dessa ó o diagrama de Corpo Livre aqui eu tenho força axial eu tenho as forças aqui cortantes né Daqui a pouco a gente vai falar disso eu tenho os momentos isso aqui pode ser um diagrama de Corpo Livre de uma viga de um prédio inteiro você faz um prédio Aí de 20 andares por exemplo 40 andares todo de estrutura metálica e cada uma das vigas tá nessa condição O que que é isso isso aqui é o diagrama de
Corpo Livre de uma das vigas que nós vamos estudar daqui a pouco pouco que juridicamente ela não está isolada do mundo essa viga aqui ela tá interagindo com os vizinhos é que os vizinhos estão representados juridicamente por intermédio dessas forças são as forças que ela troca com o vizinho por que que eu digo troca né porque ela aplica uma força o vizinho reage aplica uma força nela ação e reação né respeitar o nton aí pelo amor de Deus né Tá certo só que tem uma questão que eu gostaria de mencionar pra gente encerrar a nossa
discussão que quando você olha pra estrutura Olha só isso aqui encerra a nossa conversa mas isso tem de ser mencionado quando você avalia a estrutura você chegou numa relação do tipo forças que agem na estrutura de quem nós estamos falando aqui para que a gente não elas estão falando deste cara aqui ó é deste cara que nós estamos falando isso aqui é o elemento isso aqui é a estrutura forças que agem na estrutura Matriz de rigidez da estrutura deslocamentos da estrutura esse aqui ó esse daqui são os deslocamentos do nós da estrutura qual é o
objeto O que que a gente precisa numa primeira instância nós precisamos calcular os deslocamentos dos Nós Olha só Imagine que eu tenho uma viga aqui eu vou aplicar o deslocamento nodal a viga deformada aqui eu tenho o eixo X aqui eu tenho Y Isso aqui é uma função é que a gente aprende função na matemática abrir o raciocínio né a função é a viga nós queremos calcular isso aqui eu poderia pensar né ah vamos passar a matriz f a matriz k pro outro lado dividindo se o matemático me ouve fazer isso ele me processa ní
com razão né ou seja vou escrever essa equação só que eu tô eu tenho que escrever isso aqui com uma certa formalidade né como é que eu escrevo essa equação com uma certa formalidade usando os conceitos que nós vimos ainda agora se nós pré multiplicarmos as duas equações pela inversa da Matriz de rigidez dado que você já aplicou a restrição então o determinante deste cara aqui não é zero né até aqui é o delta é um k del Tazinho só para lembrar né O que que é a matriz inversa multiplicada pela própria Matriz é a
famosa Matriz identidade o que que é a matriz identidade multiplicada pela Matriz dos deslocamentos é a própria Matriz dos deslocamentos então A grande questão né que é resolvida por elementos finitos quando você tá utilizando o software do ponto de vista matricial é esta equação onde o delta é k - 1 que multiplica o f Ou seja você inverte a matriz de rigidez quer dizer quando eu digo você é o amiguinho ali é o software né Ele é pago para fazer isso você monta o modelo o software inverte a matriz e ele multiplica pelo Matriz das
forças que depende das forças que você colocou nos nós da estrutura ou do melhor dizendo do modelo fazer produto de Matriz como diz o pessoal aí é uma baba né quer dizer mas tem o grande problema é inverter Matriz isso dá um trabalho desgraçado eu quero dizer o seguinte quando você inverte a matriz aqui tem um detalhe importantíssimo importantíssimo que tudo que nós estamos falando aqui tá documentado né você lembra disso aqui Você tá lembrado desse exercício quando você aplicou a restrição Você cortou as linhas e colunas que passam pelos graus de liberdade que correspondem
à restrição quem sobreviveu este cara aqui ou seja quando você vai fazer essa operação Esta é a matriz de rigidez que sobreviveu depois que você aplicou a restrição o que eu tô querendo dizer é que este cara aqui ó este cara aqui é aquela Matriz lá que eu tô falando aquele Amarelo lá a partir do momento que você colocou a restrição isso aqui não muda mais para uma dada condição de restrição você calcula a matriz inversa que dá um trabalho imenso é isso que demora no processamento de elementos finitos Mas a partir do momento que
você determinou se você tiver diferentes condições de carregamento pra mesma Matriz de rigidez esse produto é muito rápido é por isso é por isso que quando você define a restrição no seu modelo de elementos finitos você pode processar processá-lo para vários carregamentos ou vários load cases você roda o modelo aí ele roda para um carregamento depois ele roda para outro carregamento outro carre roda 10 carregamentos diferentes porque se a condição de restrição não mudou a matriz de rigidez e a sua inversa é sempre a mesma então esse trabalho imenso da inversão só é feito uma
vez e como consequência quando nós estamos fazendo análise linear nós podemos fazer combinações de carregamentos você calcula para um determinado que é o que a gente chama né que são os chamados load sets são as condições de carregamento que você estabelece e depois você faz combinações de resultados para cada um dos load sets individuais mas a matriz de rigidez não muda é sempre a mesma e como nós estamos fazendo falando de uma análise linear análise linear permite de você fazer superposição então numa análise linear você calcula vários vários load cases né e tem a a
resposta de deslocamento tensão e deformação e em seguida você faz as combinações de carga tudo isso dentro da hipótese da análise linear que tem que é muito bem definida nós vamos daqui a pouco né em seguida começar a falar dos elementos de viga E aí Nós já vamos começar a estabelecer eh e alguns conceitos fundamentais para que se possa usar os princípios da análise linear né e Isso é perfeitamente amarrado não tem não tem como uma dúvida quanto a isso mas esse no f no fundo quer dizer tudo que a gente tinha que falar sobre
o procedimento de montagem que é montar a rigidez da estrutura a partir da rigidez de cada elemento e que tem como subproduto deslocamento dos Nós nós já fizemos né É claro que tem um monte de detalhes no meio desta trajetória né e esses detalhes foram sendo cobertos e o que é muito importante é que a gente usou elementos simples para poder entender conceitos muito mais Gerais a gente chegou a fazer um comentário aqui a respeito do batato né olha só quer dizer nós estamos usando elementos que tem forma tem nome endereço CPF é uma mola
uma uma treliça uma viga uma chapa depois que a gente cobrir tudo isso quando a gente tiver fechando esse primeiro estudo da análise linear nós vamos dar a formulação Geral do método usando o conceito mais geral possível mas aí é perfeitamente compreensível porque você já estudou todos os elementos né Então essa é a estratégia Esse é o mapa vou fazer até uma brincadeira o seguinte né Eu acho que todo dia tem cara que é dormir faz uma oração e tal eu acredito nisso para particularmente né uma pessoa que tem muita fé e lê uma Bíblia
assim tal o cara que trabalha com elementos cinos acho que ele devia todo dia olhar esse cara aqui falar assim bom aqui tal porque o cara não pode viver sem isso faz um quadro e põe ali do lado da estação gráfica que você tá trabalhando toda vez que você fizer uma análise você tem que saber aonde que você tá nesse mapa é surpreendente que você vê pessoas que trabalham com software e desconhecem profundamente isto aqui Isso é uma temeridade isso tem isso aqui resume todo o primeiro pilar dos elementos finitos que nos permitiu chegar aqui
nos deslocamentos nodais todos os esforços que nós vamos fazer daqui paraa frente é tendo o deslocamento nodal calcular o deslocamento e a deformação dentro do elemento aí você fala assim mas nós não fizemos isso é Fizemos fizemos com a mola mas a teoria da mola é tão banal tão banal que se você tiver o dois e o um já acabou a teoria da mola é a diferença do deslocamento multiplicado pelo k né A Teoria da mola é ordinária né o cara fala pô ordinária Como assim ordinária no sentido de simples né o cara estuda equações
diferenciais Ordinárias o que que é isso Como assim tá chegando a equação Não no sentido de simples a tira da mola é muito simples Essa foi a vantagem da gente ter usado a mola e a treliça para entender coisas muito maiores do que ela a mola permitiu estudar o procedimento de montagem e a treliça o entendimento da transformação de coordenada e a viga que nós vamos estudar agora ela vai entender né ela vai nos abrir um caminho imenso para elementos finitos porque a viga é o primeiro elemento que nós vamos estudar que vários comportamentos diferentes
convivem juntos e um não tem nada a ver com o outro olha só que interessante hein uma viga ela tem ação axial ela tem flexão ela tem flexão e ela tem torção todos esses comportamentos convivem junto e um não afeta o outro tanta gente que convive junto e não tem nada a ver com o outro porque que uma viginha não pode não é verdade então vamos ver como é que a gente vai tratar essa questão e Esse é o próximo desafio perfeito