bom então hoje eu vou est começando uma série ali de videoaulas ali sobre a parte de controle digital tá sistemas de controle discretos antes eu abordei ali bastante coisa sobre o sistemas de controle contínuo né então agora a gente vai est vend na parte ali de controle digital né que porque o tratamento matemático ele é diferente né dos sistemas contínuos então começando com uma introdução tá ã os sistemas discretos né os sistemas digitais então eles vão est processando informações obviamente digitais né e os elementos agora em vez dos controladores e compensadores contínuos que a gente
tinha antes no no no controle analógico agora a gente vai ter ã computadores e microcontroladores né que vão tá lidando com essas informações digitais tá onde a gente vai ter um algoritmo tá que vai implementar uma determinada função de transferência como um controlador e um compensador tá nesses nesses caras aqui e uma iso é importante tá nos sistemas de controle digital tá isso também vale pros analógicos mas no caso doos digitais aqui ã o correto funcionamento do sistema como um todo ele não depende só do algoritmo de controle que tu implementou tá mas ele depende
também da precisão e da rapidez do sensor tá de conseguir acompanhar a taxa de variação da tua variável de controle né de saída né você tem que ser um sensor rápido e com uma boa precisão e dos conversores AD e da também né que a gente vai est utilizando para né para est condicionando esses sinais aqui pros computadores trabalharem né e também do atuador né que vai est atuando sobre o a planta né que pode ser o teu motor uma resistência enfim né o atuador tem que ser também bom então isso tudo aqui né não
depende só do algoritmo depende também desses caras aqui para ter um um correto funcionamento do sistema né ã a estabilidade relativa e absoluta tá no uma uma grande diferença tá paraos sistemas contínuos que a gente tinha visto antes é que agora estabilidade relativa né e absoluta Ela depende também do período de amostragem que que a gente vai utilizar no sistemas digitais tá ã bom aqui rapidamente algumas vantagens tá dos controladores digitais ã eu posso citar aqui a maior flexibilidade na alteração dos parâmetros do sistema né ou seja em vez de eu ter que ir lá
e trocar componentes de hardware né ou trocar o controlador analógico né Por exemplo eu faço uma simples alteração de algoritmo né e eu posso reconfigurar né ou transformar o meu meu o meu controlador ã fazendo essas simples alterações né posso implementar várias funções de transferência num único hardware né através do algoritmo ao contrário de um sistema contínuo de onde eu tenho que trocar componentes modificar o hardware né então é essa é uma uma vantagem forte aqui né dos sistemas de contoles digitais a maior imunidade ao ruído também né nos sistemas digitais aqui e e um
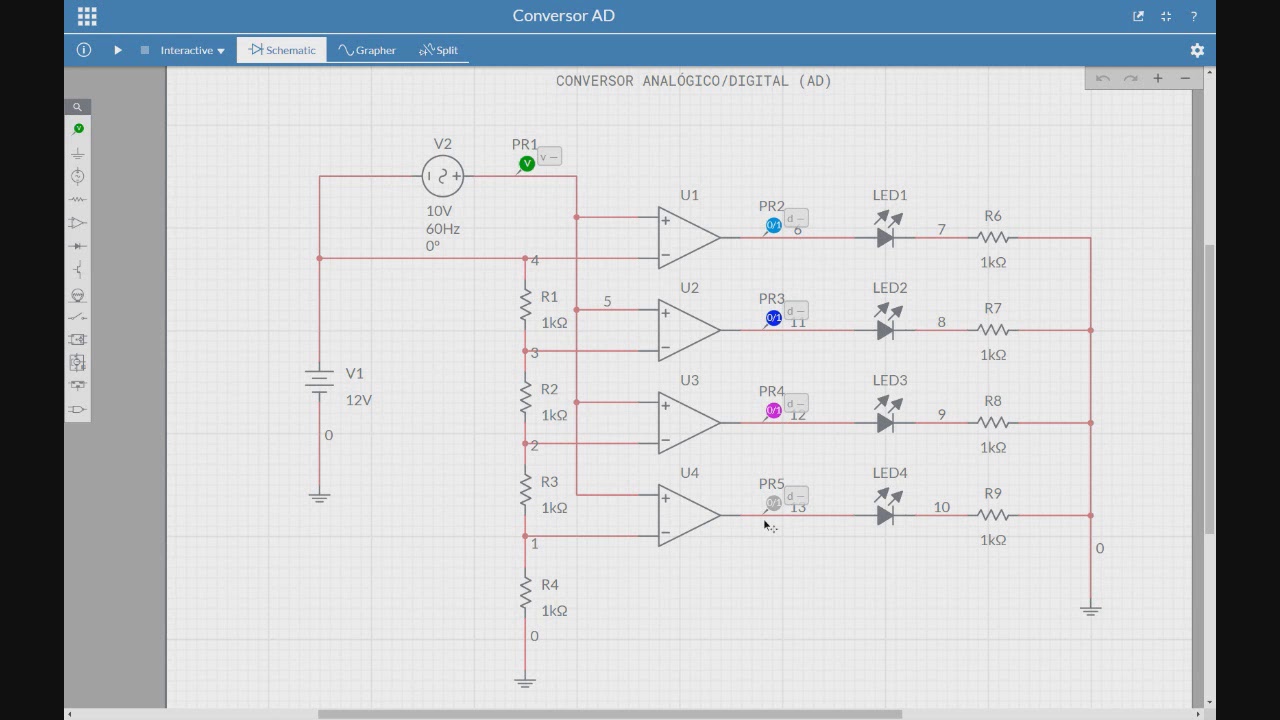
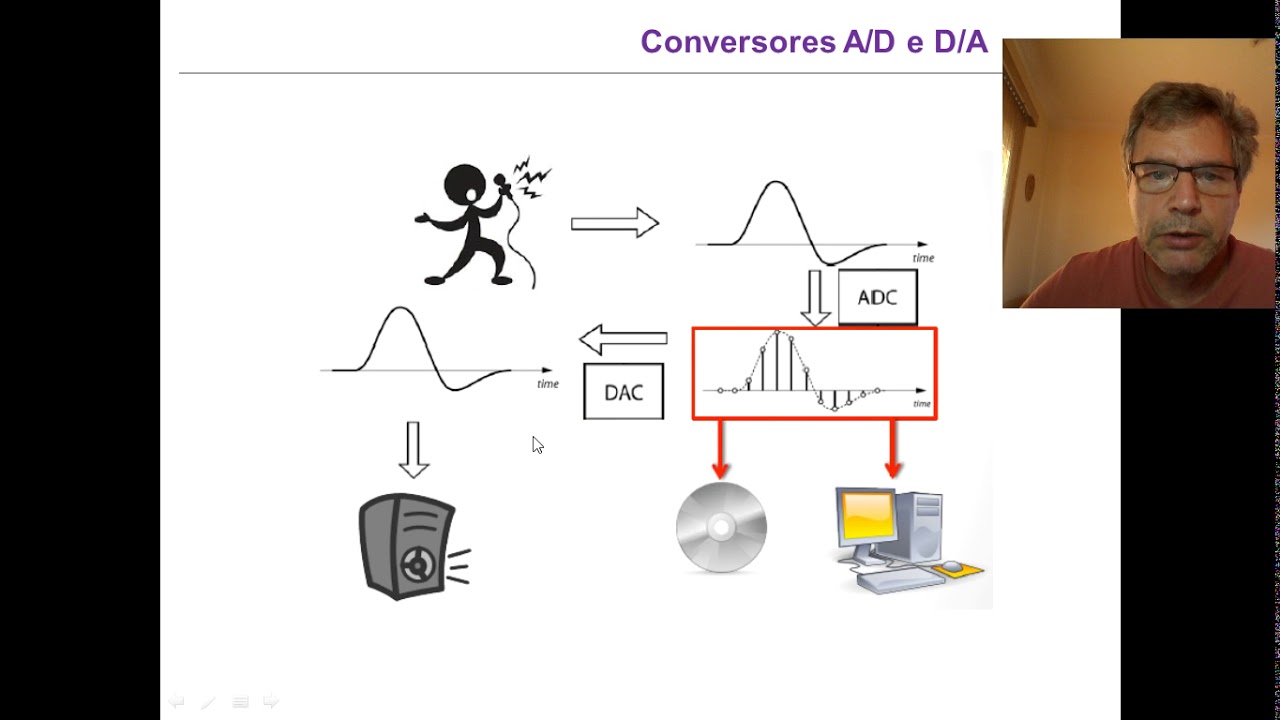
único controlador digital ele poderá implementar a função de um ou até mais controladores ou compensadores analógicos né Isso vai depender da capacidade também do teu controlador né do teu do teu microcontrolador digital né enfim ã os conversores tá conversores AD e da eles são necessários porque fundamentalmente né fora dessa área aqui onde onde o computador tá atuando na planta aqui né que isso aqui é um exemplo simplificado aqui de uma planta com contro digital o sinal aqui que sai aqui do da que atua na planta né o sinal da variável de controle o sinal que
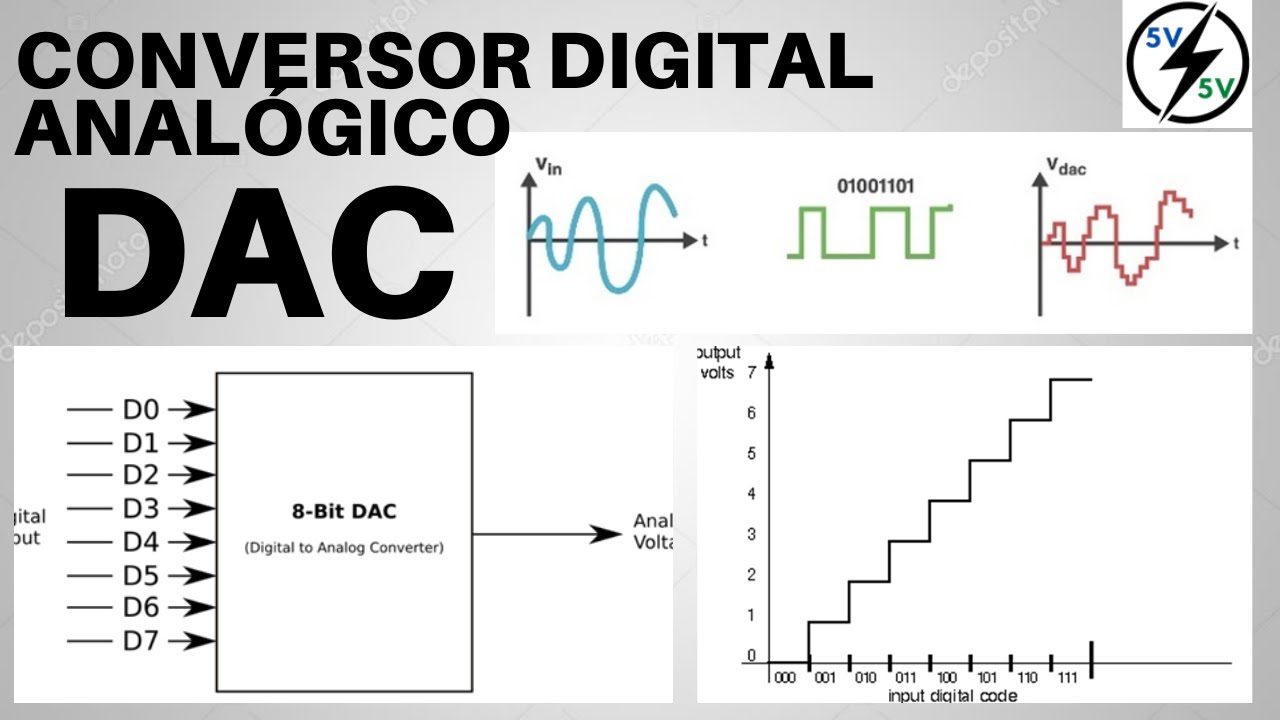
o sensor processa são sinais contínuos né na na grande maioria dos casos são sinais contínuos por exemplo temperatura posição velocidade né sinais analógicos e contínuos então ã existe a necessidade de gente tratar esse sinal aqui né H condicionar esse sinal através de conversores AD da para que o teu controlador né o teu micro microcontrolador teu computador aqui com processador digital possa est ã efetuando a ação de controle dele né ã falando especificamente dos conversores AD e da tá a conversão de a né digital para analógico ela é em geral mais simples e realizada quase instantaneamente
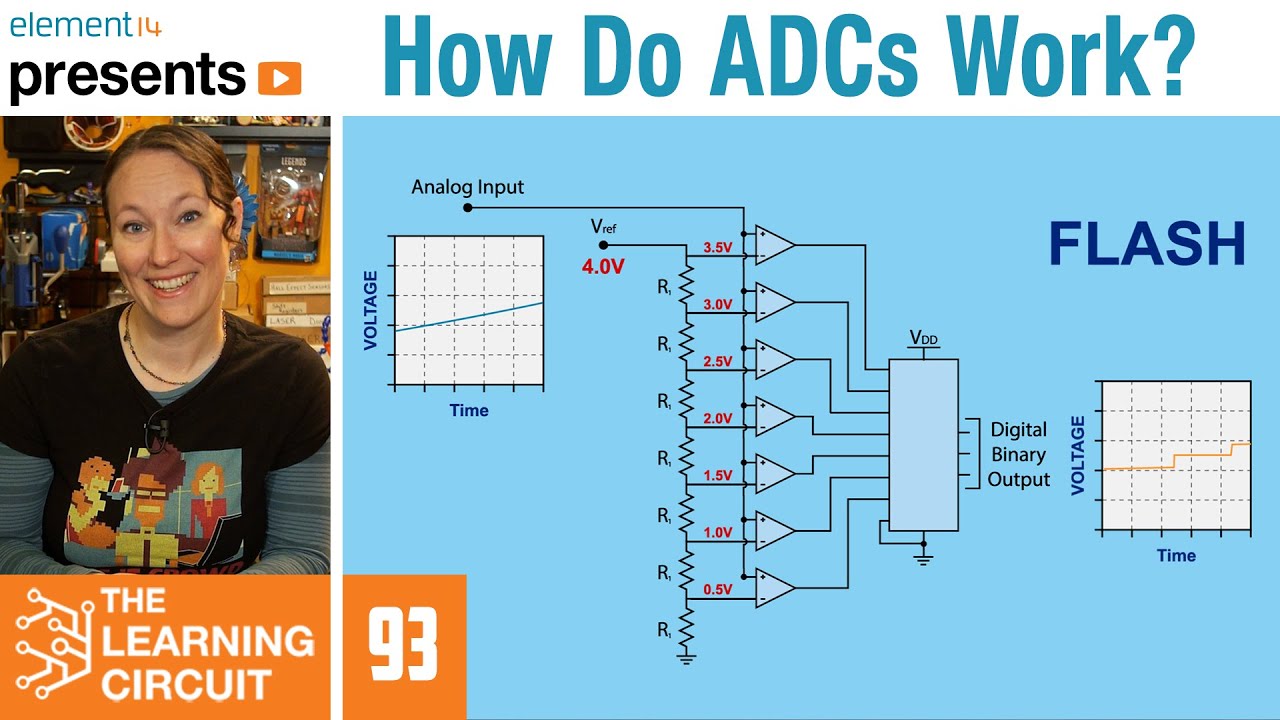
tá em comparação com a conversão AD porque a conversão AD ela é feita em Dois Passos então ela não não é instantânea tá ã o conversor AD ele é composto por um bloco amostrador e um segurador tá eh é esse cara aqui o amostrador ali que que causa diferença no tratamento matemático entre os sistemas contínuos e os discretizado que a gente vai estudar agora tá então basicamente tá essas são três características de um conversor AD que a gente tem que prestar atenção que é a quantização taxa de amostragem e a linearidade tá a quantização tem
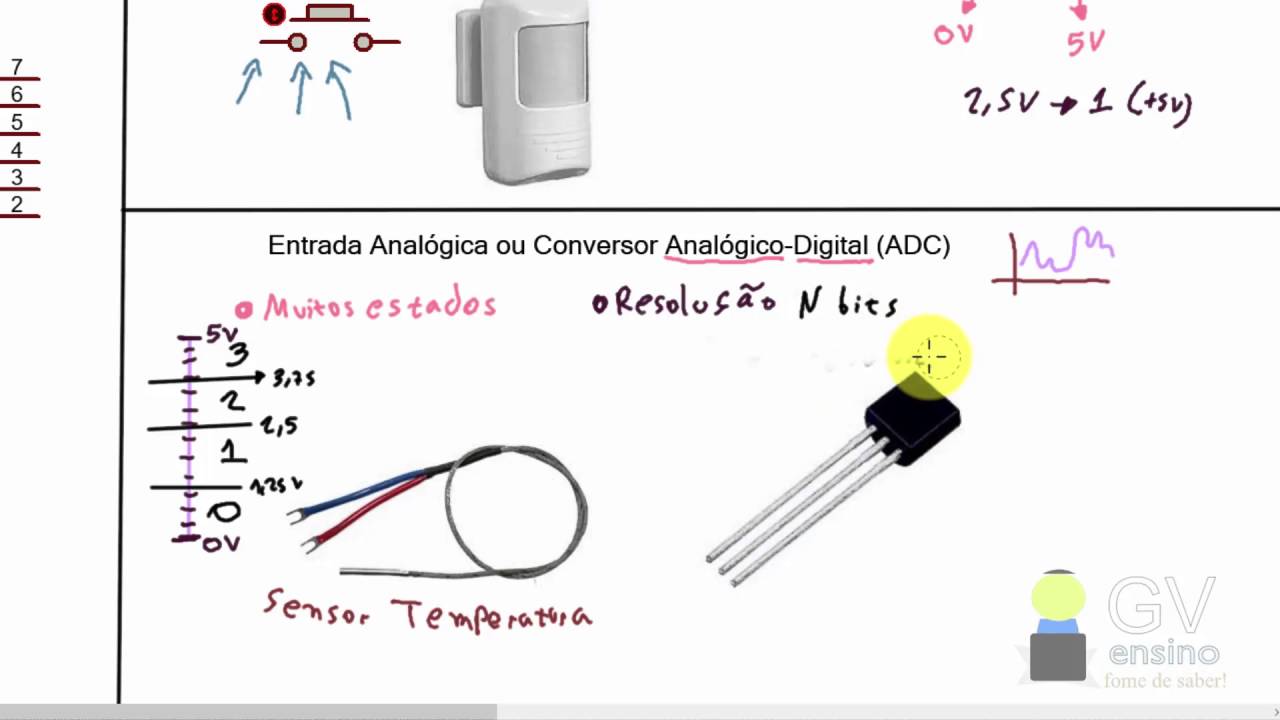
a ver com a divisão ali da escala de tensão analógica em valores digitais tá isso depende do número de bits de saída que o teu conversor AD tem então num exemplo se a gente tiver uma escala de 0 a 8 V tá um sinal analógico com cont que pode variar de 0 a 8 v e o teu conversor AD ele é um conversor com 4 bits PR PR conversão para digital né pro sinal digital então a conversão ela vai se dar integrus Tá tu vai pegar e e vai vai fazer dois na quro né Tu
vai pegar dois na n como o n aqui é 4 bits tu faz dois na 4 tu vai ter 16 e vai dividir a tua escala de tensão analógica pelo por esse número né 16 então tu vai ter 0,5 vol né a cada vez que o que esse sinal analógico variar 0,5 V eu vou ter uma variação na na saída do do meu conversor AD né então isso aqui que é a ideia de quantização tá aí a gente diz que a resolução nesse exemplo seria de 0,5 V ã se usarmos um conversor AD de 8
bits agora né o dobro de bits 2 na 8 é 256 de tá ã para fazer um voltímetro lê uma tensão analógica de 0 a 10 V por exemplo tá a resolução será então 10 por 256 e os degraus aqui eles terão 0,04 V de altura né seria uma resolução já bem melhor né pela quantidade maior de bits a taxa de amostragem tá como eu vou amostrar o meu sinal analógico contínuo né a taxa de amostragem que eu vou ter no meu conversor AD tá que ele vai precisar suportar depende da frequência máxima do sinal
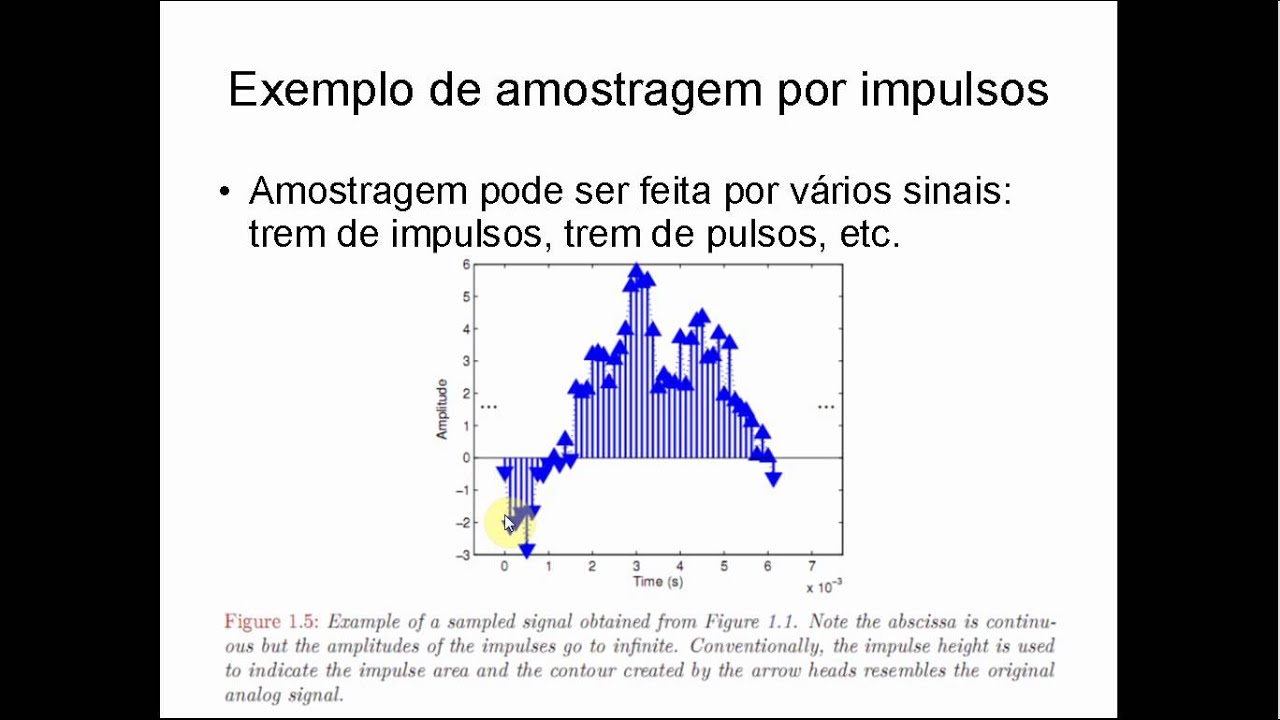
amostrado tá Por que que eu digo frequência máxima tá porque se eu tiver uma senoide aqui a única frequência que compõe esse sinal é a própria senoide então a gente sabe que a frequência máxima é a frequência nominal né Desse sinal aqui né da componente harmônica mas quando a gente tem uma onda quadrada por exemplo né a máxima frequência que compõe esse sinal ela vai ser uma frequência sei lá da ordem de 10 20 vezes a a ordem da fundamental aqui né que compõe essa onda Então eu tenho que pensar né Para que eu consiga
depois ã reconstruir um determinado sinal ali eu tenho que mostrar ele é uma taxa h de segundo a regra de de nik né No mínimo duas vezes a frequência máxima do sinal Então para mim reconstruir Por exemplo essa Ona quadrada com uma boa precisão eu preciso serar de umas 10 15 harmônicas eu preciso considerar né então considerar a taxa de amostragem sempre olhando para as harmônicas de maior ordem né que compõe o sinal ã a questão da linearidade tá então às vezes a gente acha que a curva de conversão ela é uma reta né que
seria o ideal né ah eu ten um valor Val analógico bot ter um determinado valor digital de acordo com essa função linear aqui né mas nem sempre é alo que ocorre tá a curva de conversão da grandeza analógica para forma digital deve ser linear para um bom conversor tá isso significa que não existiriam né Se fosse linear desvios na correspondência entre o valor analógico e a saída Digital ao longo da escala de valores que o conversor deve trabalhar no entanto na prática podem ocorrer pequenos desvios então isso daqui ó essas essas curvas de fora aqui
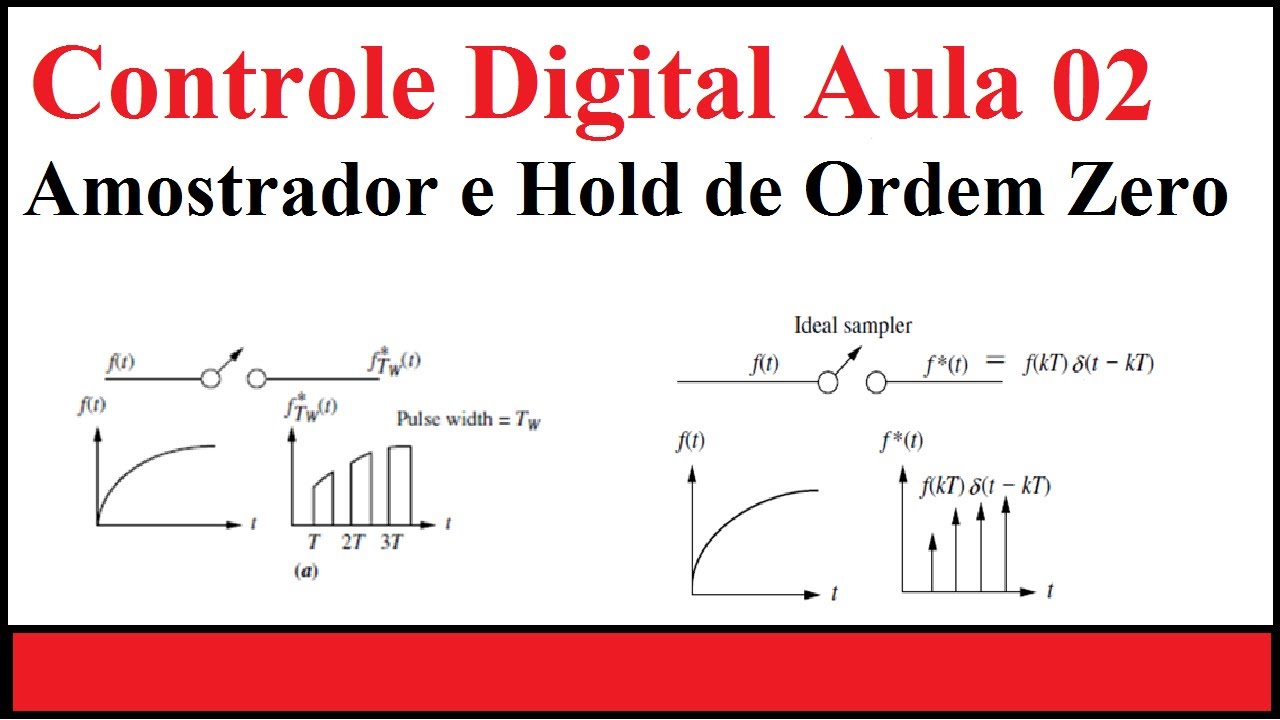
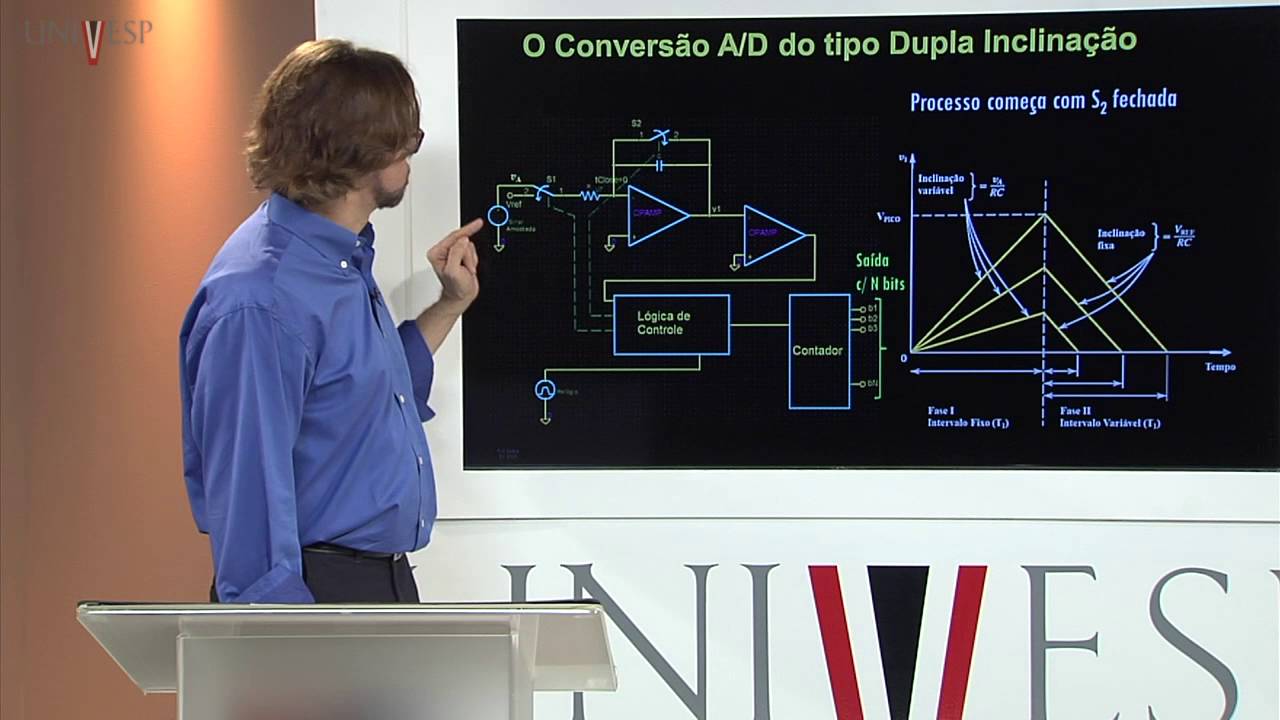
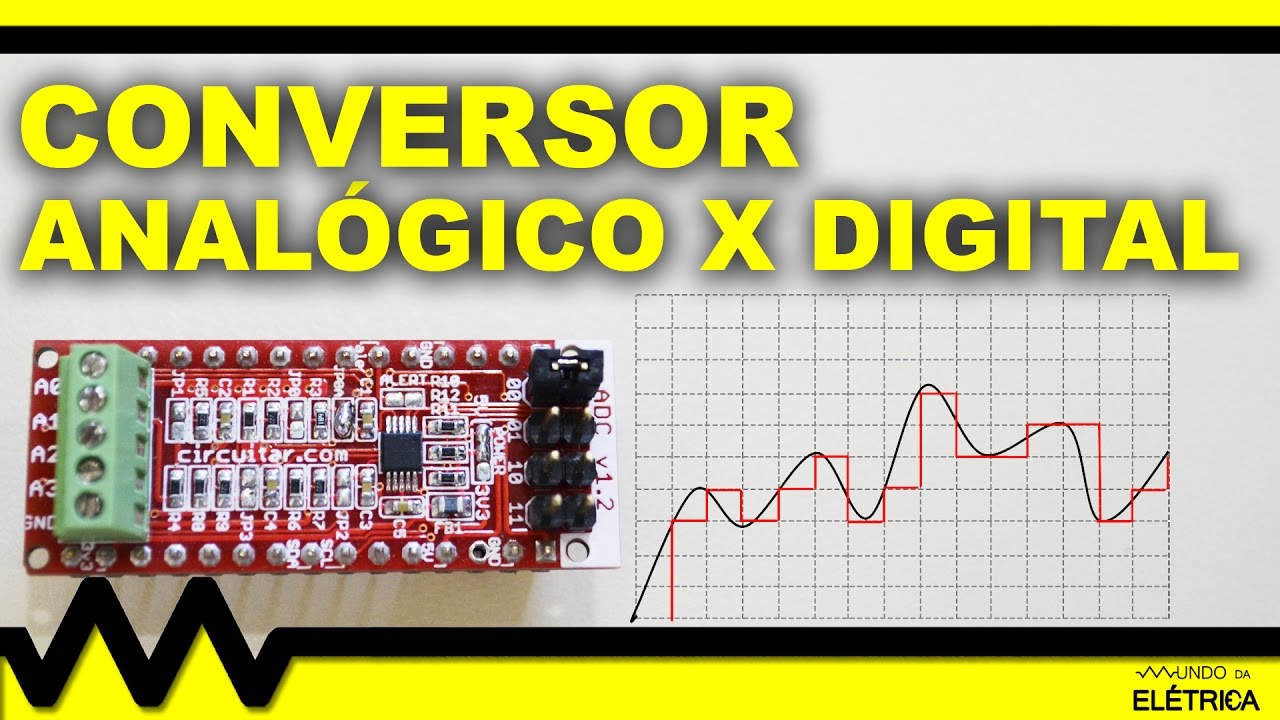
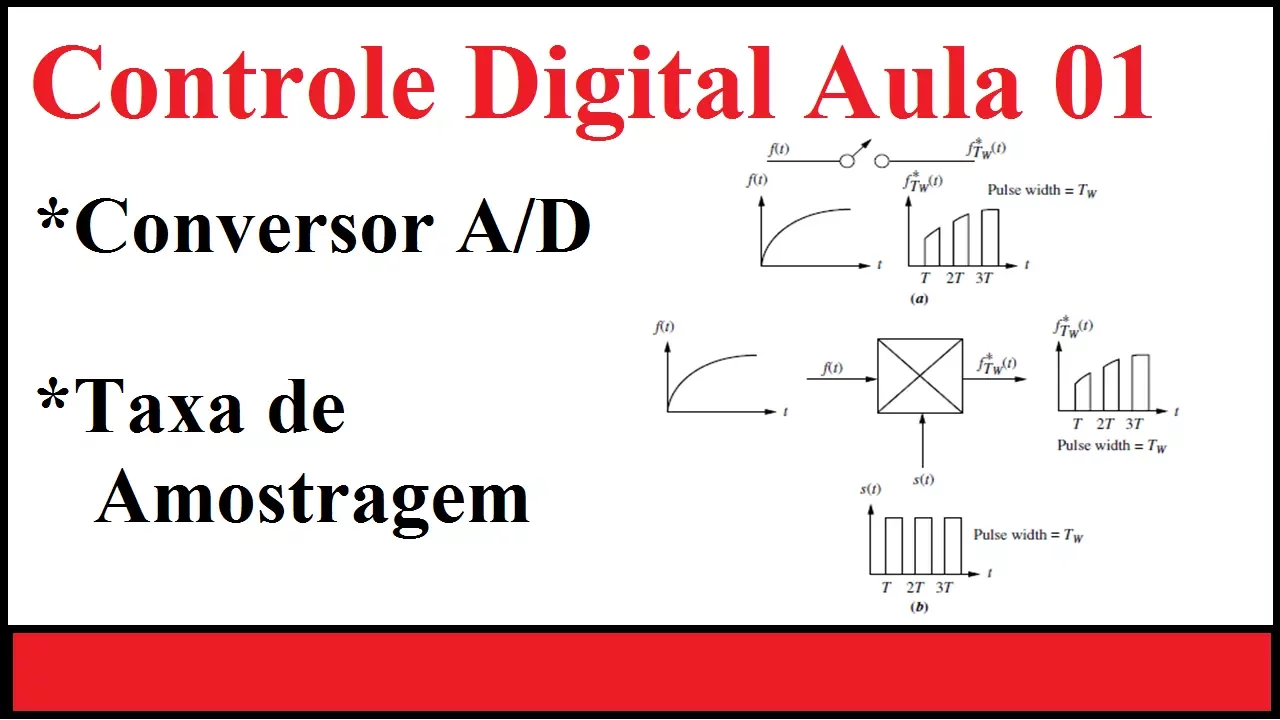
ela seria uma uma não linear tá onde seria indesejável tá o ideal seria trabalhar um conversor com com a faixa de operação mais linear possível tá dentro do que da da faixa de valor analógico que tu vai est trabalhando no no teu sistema né Aqui tem os passos da conversão AD tá é um slide simplificado aqui mas eu tenho aqui por exemplo um sinal contínuo tá ele tá variando ali de forma contínua um sinal analógico também né pode ser consider e eu vou est amostrando esse sinal aqui né com a chave então cada vez que
a chave baixa eu tenho esses pontos aqui né aqui aqui cada vez que que a chave bate um degrau Sobe aqui e quem faz a leitura né do do dessa amostra analógica aqui nesse instante aqui é a chave e ela vai passar esse valor aqui para esse bloco que a gente chama de Hold de ordem zero tá que é bastante utilizado nos conversores AD o papel desse cara aqui tá é manter o nível que a chave ã que a chave entregou para ele tá no instante da amostragem aqui manter esse valor constante ali poro pelo
valor de tempo correspondente ao período de amostragem tá então cada vez o valor vai mudando aqui o valor analógico Cada vez que a chave bate e esse cara aqui ele mantém essas retas aqui né tem todas o mesmo comprimento aqui que é o período de amostragem então basicamente essa que é a a operação de um conversor AD tá porque manter manter esse nível aqui é necessário tá porque o conversora dele não consegue fazer a conversão eh instantaneamente eu preciso manter um determinado tempo aqui o valor para que o conversor consegue consiga processar né o valor
dessa informação aqui analógica e consiga na saída produzir um sinal digital correspondente tá então por isso que eu falei antes que a conversão AD ela é mais demorada que em geral né que é a conversão digital analógica porque tu precisa segurar um determinado instante de tempo aqui o valor até que o valor digital na saída seja efetivamente processado né ã uma coisa importante tá se por que que a gente que eu falei no começo lá que o tratamento matemático por sistemas digitais ele é diferente do contínuo tá justamente porque existe a conversão AD tá e
se ela corresse instantaneamente e o período de amostragem tesse a zero então tu tenderia aqui a ter o sinal contínuo novamente né então não haveria necessidade de fazer uma distinção no tratamento matemático né dos sinais discretos e dos analógicos né podendo poder podendo se utilizar também a transformada de la classe então é justamente por causa desse cara aqui né que que a gente vai ter que H fazer um novo tratamento matemático né que vai ser com a transformada Z no caso né então na na próxima aula eu vou est começando ali iniciando o trabalho do
tratamento matemático tá do amostrador e do do Hold de ordem zero que a gente viu antes ali então é isso aí até a próxima