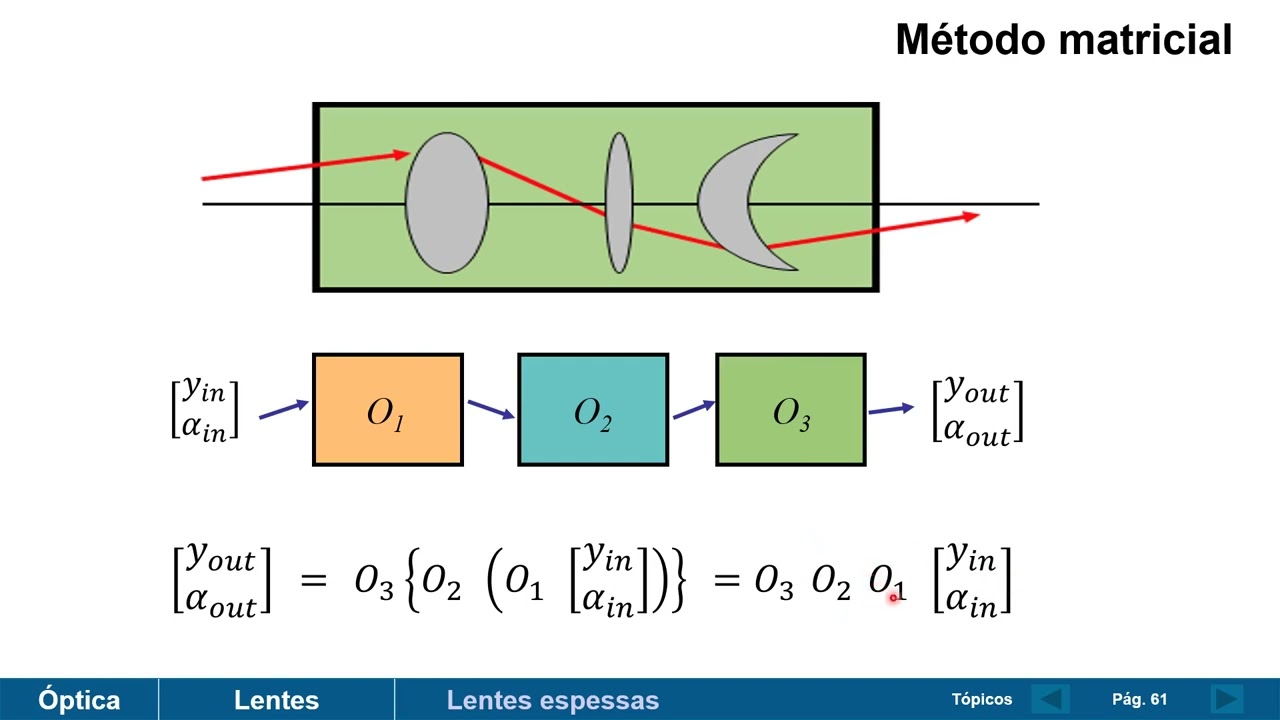
[Música] Olá pessoal no vídeo de hoje vamos resolver aqui um problema de tensão plana mesmo problema feito pro elemento triangular só que agora utilizando o elemento plano de quatro nós problema consiste aqui de uma chapa uma carga distribuída uma pressão aplic aqui em uma das suas arestas e aqui no enunciado é dados são dados os valores as dimensões temos aqui os apoios e a ideia é desenvolver aqui a formulação do método do dos elementos finitos utilizando o elemento plano de quatro nós então aqui como dados de entrada principais né tá sendo dado aqui a matriz
de incidência nesse caso só tem um elemento né Então tá dado aqui a numeração de cada da nó que compõe um elemento temos aqui as propriedades desse elemento módulo de velocidade coeficiente de passon e a espessura né uma propriedade da geometria e aqui é a tabela de coordenada dos nós e nós queremos desenvolver um sistema de equações na forma igual a f ig a k xes u dos nós né sabemos aqui de anão as dimensões aqui dos vetores da Matriz eh como esse problema apresenta 8 graus de liberdade né Total a dimensão da Matriz é
8 por8 Cada nó tem 2 graus de liberdade no elemento plano Tá certo deslocamento x deslocamento y e aqui tô mostrando aqui também as condições de contorno né é dada aqui pela simbologia dos apoios dos apoios fixos e do apoio móvel no no Um e a primeira Matriz aqui determinada né com base nas propriedades dos materiais é a matriz constitutiva D ok que relaciona as deformações com a tensão no caso plano temos aqui a componente XY e a componente e Sigma XY e Gama XY né referentes ao calamento então Considerando o material isotrópico elástico linear
substituindo os valores aí do coeficiente de Poa e módulo de elocidade né os valores conhecidos Nós escrevemos aqui a nossa matriz constitutiva e a segunda Matriz né importante é a matriz de funções de forma tá aqui para o para o elemento plano de quatro nós ela tá dada aqui em destaque ela apresenta as componentes ni j k e l que são as funções de forma referentes a cada um dos Nós do elemento E essas expressões são conhecidas da Formula ação isop paramétrica do elemento plano de quatro nós tô mostrando aqui as expressões dessas funções né
que compõem aqui a matriz de funções de forma e essas expressões São escritas né em termos das coordenadas naturais representadas aqui pelo i e ETA né uma forma da gente visualizar aqui esse elemento no espaço XY também chamado de domínio físico é visualizar ele no domínio natural tá ou domínio de referência aqui num com coordenadas k Eta né E também é importante respeitar aqui a posição dos Nós tá adotadas aqui para Essas funções de formas escritas aqui tá então nó I tá aqui na posição -1 -1 eh nó J posição 1 - 1 e assim
pros outros dois nós né o domínio natural sempre varia de men1 até 1 é uma das possibilidades da formulação isop paramétrica né permite aqui utilizar Essas funções de forma para dado um ponto no espaço natural um ponto quieta né a gente determinar esse ponto o correspondente no espaço físico XY né então substituindo aqui um ponto quieta dentro aqui do domínio do espaço natural eh substituindo essas esses valores aqui nas funções de forma e aplicando essas equações eh conhecido os valores das posições nodais né x j k e l né xi XJ xk e XL nós
podemos determinar aqui a posição XY correspondente Então essa é uma matriz conhecida né do elemento plano de quatro nós eh uma matriz aqui importante a ser determinada também é a matriz jacobiana tá dada aqui pelas derivadas parciais da coordenada física em relação às coordenadas naturais conforme esse arranjo indicado né E nós sabemos também da formulação ISO paramétrica que essas derivadas aqui podem ser reescritas né em termos das funções de forma de Cada nó e podemos então determinar a matriz jacobiana com base na multiplicação de duas matrizes né uma matriz que contém as derivadas aqui parciais
das funções de forma em relação às coordenadas naturais e uma matriz de posição ou de coordenadas dos nós que compõem o elemento e aqui tem então essa Matriz no caso plano jacobiano vai ser uma matriz 2x 2 né Eh essa primeira Matriz é uma matriz eh cuja expressão é conhecida porque as funções de forma são conhecidas né Então as derivadas parciais podem ser determinadas e essa segunda Matriz também é uma matriz conhecida porque as posições nodais são valores conhecidos da malha né então utilizando os valores do problema e executando aqui a multiplicação dessas duas matrizes
nós chegamos aqui na matriz jacobiana e consequentemente podemos calcular o seu determinante também chamado de jacobiano e podemos calcular a sua inversa tá estão mostrados aqui essas expressões eh nesse problema em particular todos esses termos são constantes Tá certo porque o elemento tem um formato retangular né no caso aqui é um quadrado e nesses casos a matriz jacobiana e o seu determinantes são constantes né em elementos distorcidos eh a matriz jacobiana e o seu determinante e sua inversa podem eh permanecer como uma função das coordenadas que ieta Ok eh uma das utilizações da Matriz jacobiana
né é determinar que a as derivadas físicas das funções de forma as derivadas em relação a x e y para conseguir determinar a matriz deformação deslocamento a matriz B dado aqui pelo operador Gradiente simétrico vezes a matriz de funções de forma do elemento Então aqui tem a expressão da matriz b pro elemento plano 4 nós ela tem uma dimensão 3 por 8 né e a determinação das derivadas físicas né em relação a x e y ela pode ser obtida a partir das derivadas e naturais né em termos das coordenadas q e ETA fazendo aqui o
uso da matriz jacobiana inversa tá então tendo a matriz jacobiana inversa vezes as derivadas aqui no espaço natural a gente obtém as derivadas no espaço físico dessas funções de forma OK aí determinados aqui as derivadas em relação a x e y né as derivadas físicas a gente pode então escrever a matriz deformação deslocamento então executando essa multiplicação do eh podemos escrever a matriz deformação deslocamento tá mostrada aqui na na imagem tá então observem que nesse caso a matriz B só temos um elemento né ela tá escrita em termos das coordenadas q e ETA ok Ela
não é uma matriz constante como é o como é no caso do elemento plano de três nós tá então aqui é uma primeira utilização da Matriz jacobiana né a determinação das derivadas físicas das funções de forma eh tendo determinado aqui a matriz B né Nós podemos calcular a matriz de rigidez do elemento dado aqui pela expressão geral B transposto DB D Ô né integral em Ôme e nossa sabemos aí da formulação isoparametric que essa integral é transformada né num num domínio natural de -1 até 1 é onde surge aqui um um determinante o determinante da
matriz jacobiana né o jacobiano essa integral da Matriz de rigidez ela é resolvida por meio da quadratura de gaus Ok então ela é transformada numa numa somatória vamos ver aqui aqui são dadas dimensões das matrizes né e a solução numérica dessa integral dupla é dado por meio de uma somatória né usando a a quadratura de gaus de pesos w WJ vezes o valor da função em posições específicas né são os pontos chamados pontos de gaus no caso particular do do elemento plano qu nós a regra mais usada é a regra 2 por2 tá E então
que tem essa expressão aqui aberta aqui eu tenho o o número de pontos no no na direção i e na direção Eta ambos iguais a dois né chamada regra 2 por2 que corresponde a a chamada também integração completa pro elemento plano quadros a determinação dessa somatória então ela só e precisa eh é ser conhecido os valores dos pesos que são valores tabelados né da quadratura de gaus e o valor da função imposições específicas que são os pontos de gaus tá E observem que esse termo aqui do integrando Corresponde à nossa função k uma vez que
a matriz B é uma função de q ieta Ok determinante também do da Matriz jacobiana também poderia ser né eh isso acontece como eu comentei em caso de elementos distorcidos né também seria uma função de q e ETA tal que esse integrando Corresponde à nossa função e nós vamos substituir pontos específicos aqui dentro dessa função e executar essa somatória tá Eh esses pontos na regra 2 por2 eh São localizados aqui nessas posições indicadas em vermelho né são valor são posições com conas n e o peso na regra 2 por2 também é são valores conhecidos no
caso Vale 1 e 1 tá tanto pro eixo correspondente à variável Eta como PR variável I Então substituindo aqui essas posições Q1 Eta né dentro aqui do da função que no fundo seria substituir Na expressão da matriz b e executando aqui a nós vamos obter né uma matriz como resultado 8 por8 correspondente a essa substituição no ponto 1 depois no ponto 2 no ponto 3 e no ponto 4 Ok seriam tal que a matriz de rigidez do elemento vai ser dado pela soma de cada uma dessas matrizes determinadas nos pontos de gaus né então aqui
eu tô mostrando a as expressões de cada uma dessas matrizes né substituindo e essa posição dos pontos de gaus Na expressão aqui do integrando né e a soma dessas matrizes vai nos fornecer a matriz de rigidez do elemento tá então aqui tá mostrada a expressão da Matriz de rigidez do elemento um no caso aqui temos apenas um elemento e aqui também tá sendo mostrada a marcação dos graus de liberdade que no caso do elemento plano de qu nós temos aqui essa expressão que permite determinar a marcação dos graus de liberdade em função da numeração dos
Nós dada na matriz de incidência no caso aqui é um elemento então é bem bem direto né Eh a matriz global é dada pela montagem da Matriz de cada elemento eh como aqui no caso nós temos um elemento ela coincide com a Matriz do elemento um né Então tá aqui a expressão da Matriz de rigidez global e o outro vetor que nós podemos escrever é o vetor de deslocamentos nodais né Eh tá escrito aqui tem dimensão 8 por1 né só temos um elemento aplicando aqui as condições de contorno né dada aqui pela pelos apoios nós
podemos reescrever esse vetor né como as os valores nul aí nas posições correspondentes ao ao grau de liberdade restrito e o último vetor que tem que ser escrito para montar o sistema final é o vetor de forças f e a gente sabe que ele é composto pela soma aqui de quatro parcelas uma referente às cargas pontuais né que no caso aqui não temos nenhuma carga pontual aplicada então é um vetor todo nulo né Tem dimensão 8 por1 uma dimensão já conhecida é o vetor de forças de reação que apresenta valores desconhecidos nas posições de grau
de liberdade onde eu tenho condições de contorno essenciais então aqui o vetor de forças de reação é um vetor de forças de campo né chamado um vetor consistente ou equivalente que é dado pela pela montagem de vetores de força de campo de cada elemento e o o Idem para um vetor de forças de superfície sim aqui um vetor equivalente que é dado também pela montagem de um vetor de forças de superfície para cada um dos elementos da malha no caso do vetor de força de campo né Eh o FB maiúsculo também chamado de Vetor consistente
ou equivalente né Eh ele é dado aqui pela montagem de um vetor FB minúsculo de cada elemento né E esse vetor tem uma expressão conhecida mostrando aqui é um n transposto FB do elemento e de ôa sendo que o FB do elemento Esse sim é o vetor de força de campo dado aí como força por unidade de volume nesse exemplo em particular ele apresenta tanto na direção x quanto na direção Y valores nulos não temos força de campo atuante nesse problema tal que a multiplicação aqui desse vetor nulo pela a matriz de funções de forma
vai me dar um vetor 8 por1 né todo nulo e consequentemente a montagem dele só temos um elemento Na Mia vai me dar o vetor eh equivalente aqui FB também todo nulo é o vetor de força de superfície segue a mesma ideia eh ele tem uma expressão conhecida né e ne transposto FS do elemento e d Gama onde esse Gama corresponde o contorno onde eu tenho um carregamento uma carga eh distribuída aplicada né uma carga por unidade di área no caso eh tem uma expressão aqui que pode ser deduzida que é transformar esse esse Contorno
num num domínio local tô chamando de DS tal que surge aqui o um determinante de JS que é diferente do jacobiano determinado anteriormente Ok esse aqui é no caso do elemento de dois de quatro nós esse determinante é dado pelo comprimento da aresta carregada sobre do é é o determinante da transformação local tá o vetor força de superfície atuante no elemento pode ter component X e Y né esse sim aqui dado por unidade de área né ou megapascal ou Pascal nesse problema em particular nós temos na direção x olhando aqui o sistema de coord ordenadas
um valor nulo e na direção y o valor da carga 400 negativo né oposto a ao sistema ao eixo Y aqui né - 400 megapascal Ok e a solução aqui dessa integral né ela permite quatro possibilidades Dependendo de qual aresta tá sofrendo o carregamento tá nesse caso aqui é a matriz de incidência foi escrita tal que a aresta carregada corresp Corresponde à aresta JK Então nós vamos usar a expressão equivalente a aresta JK que é essa daqui para determinar o vetor força de superfície do elemento então fazendo a substituição dos valores aqui do comprimento vezes
espessura sobre 2 e o os valores das componentes da da força de superfície Chegamos aqui no vetor força de superfície do elemento 1 e a montagem dele né me gera o vetor equivalente FS e tal que podemos então somar aqui cada uma dessas parcelas e escrever o vetor global e agora podemos finalmente montar o sistema Global né escrevemos cada um do o vetor de força vetor de deslocamentos e a matriz de rigidez Global A solução do sistema glal Me fornece os deslocamentos nodais tá então aqui tô colocando a expressão aqui e particionada né que um
subsistema particionado que permite a determinação dos deslocamentos nodais e aqui os respectivos valores desses deslocamentos né deslocamento em x do nó 1 valor negativo nesse nesse exemplo deslocamento em x do nó 2 e o deslocamento em Y do nó do eh aqui também tô deixando a expressão matricial né particionada também que permite a determinação das forças de reação e aqui os respectivos valores e aqui pode-se verificar a condição de Equilíbrio Ok somatória de força em x eh vai dar zero e somatória de força em Y eh vai equilibrar a carga equivalente né correspondente à pressão
de 400 M atuante aqui na aresta 2 3 Ok eh tendo determinados deslocamentos nodais né podemos escrever o vetor de deslocamento do elemento Ok e novamente aqui como temos apenas um elemento esse vetor vai ser o próprio vetor Global então aqui temos vetor deslocamentos do elemento um né E a gente vai usar esse vetor para escrever o campo de do elemento Ok isso pode ser feito multiplicando a matriz de funções de forma pelo vetor de deslocamentos nodais do elemento então aqui eu tenho as dimensões né o campo de deslocamento corresponde aqui a ao deslocamento na
direção x e na direção Y aqui tem a expressão da Matriz de funções de forma né conhecida e os deslocamentos nodais do elemento foram determinados então a multiplicação da Matriz pelo vetor de deslocamentos vai me dar o campo né referentes à direção x e y tá aqui tem novamente as expressões das funções de forma de Cada nó né expressões conhecidas e então executando aqui fazendo a substituição e executando a multiplicação e a gente chega aqui nessas duas expressões né uma referente ao deslocamento x e outra deslocamento Y aqui escritas em termos das coordenadas naturais que
ieta tá tenho duas funções tal que é possível plotar Essas funções né no num num domínio aí do elemento aqui eu tô plotando ela como aqui o o elemento é regular né tô plotando elas poderia plotar substituindo aqui ó cada posição quieta né correspondente ou determinar as componentes x e y associada com cada posição quieta tá certo escrever aqui a função em termo das coordenadas x e y Então aqui tem o campo para direção x ilustrado aqui na forma de um Gradiente né de cores e o da direção y e chamando atenção aqui que esse
Gradiente tá adotando um sistema que tá desenhado conforme a imagem aqui né o eixo q tá orientado na vertical tá isso pode ser observado olhando aqui o o nosso elemento de referência né o eixo i é paralelo com o nó i j e olhando a matriz de incidência né o nó i j é o nó 1 2 Tá certo então o eixo q tá paralelo ao nó 1 2 e mesma ideia pro eixo Eta né o eixo eta é paralelo ao nó 23 né seria o Nó e JK né seria o 2 3 aqui então
o eixo Eta tá orientado conforme essa imagem tá então é fácil aqui pilotar esse esse esse gradiente de cor num software como o octav ou cilab tá tem a função né tem os valores para cada ponto aqui do do domínio você vai ter um valor correspondente a substituindo aqui na função e plota isso na forma de um gradiente de cores né tendo os deslocamentos nodais nós podemos também calcular as tensões nodais tá eh temos aqui a expressão de cálculo das tensões né no caso o plano tem componente XY e o tal XY a matriz D
é a matriz constitutiva que já foi determinada a matriz B também e a e o vetor de deslocamentos nodais também já foi determinado né então multiplicando aqui esses esses valores nós podemos determinar as componentes eh de tensão nas direções x y e o cesareo XY e observem aqui né que a matriz B ela foi é determinada como uma função da coordenada i i Eta tal que uma das abordagens na verdade a abordagem mais simples ou mais simplificada é substituir as posições eh de coordenada quieta referente ao nó de interesse então por exemplo pro nó um
que seria a coordenada q ieta -1 - 1 a gente substitui aqui -1 - 1 e efetua a multiplicação Ok então isso me permite determinar as componentes de tensão no nó 1 tá então tô mostrando aqui os valores ó deu um sigmax negativo -174 Sigma y -511 e o tal XY 84 tá E essa abordagem não é a mais recomendada tá em casos de elementos distorcidos e também não é assim utilizada em softwares comerciais n e o mais comum é determin as tensões nas posições dos pontos de gaus Ok ou no centroid do elemento também
é uma opção comum em software comercial Tá mas o mais comum é determinar nos pontos de gaus e depois fazer uma interpolação para os nós tá via uma via funções de forma adaptadas esse é um procedimento comum existem outros tá existem diversas técnicas aí de recuperação de tensão e essa aqui mostrada e reforço aqui né que é a mais simples né que é substituir diretamente as coordenadas referentes aos Nós tá aqui nessa expressão fazendo isso aqui eu tenho do nó um pro nó do a mesma ideia o nó do é o nó J né seria
no caso aqui essa posição ele tem componente q 1 Eta -1 substitui aqui na matriz b efetua a multiplicação aqui das matrizes a gente chega aqui nos valores de tensões para o nó do ok e a mesma ideia pro nó TR e pro nó 4 tá pessoal eh a gente também pode então usando essa abordagem simplificada eh efetuar a multiplicação aqui da da Matriz D x b x u dos Nós é sem substituir nenhuma posição né tal que a gente escreve as funções de q Eta de cada uma das componentes né né E aqui Essas
funções estão mostradas tá E aqui eu tá plotando Essas funções também eh num domínio aí do elemento tá aqui também vale aquela observação dos eixos Ok eh como estão orientados os eixos para substituir aqui Essas funções e obviamente se eu substituir aqui a posição q Eta -1 -1 eu vou determinar a componente X o valor que foi mostrado anteriormente e assim pros demais nós e assim pras também pras outras componentes de tensão eh então observem aqui que no elemento plano de quatro nós o o gradiente eh de tensão varia dentro do elemento né diferente do
elemento de três nós certo no caso do elemento de três nós o o as tensões são constantes né dentro do domínio do elemento no elemento plano de quatro nó já tenho um Gradiente associado bom então é isso pessoal um abraço até a próxima